
Seismic Noise Analysis System Using Power Spectral
Density Probability Density Functions: A Stand-Alone
Software Package
By D. E. McNamara and R.I. Boaz
Open-File Report 2005-1438
U.S. Department of the Interior
U.S. Geological Survey
U.S. Department of the Interior
Gale A. Norton, Secretary
U.S. Geological Survey
P. Patrick Leahy, Acting Director
U.S. Geological Survey, Reston, Virginia 2006
For product and ordering information:
World Wide Web: http://www.usgs.gov/pubprod
Telephone: 1-888-ASK-USGS
For more information on the USGS—the Federal source for science about the Earth,
its natural and living resources, natural hazards, and the environment:
World Wide Web: http://www.usgs.gov
Telephone: 1-888-ASK-USGS
ii
Contents
Abstract ..........................................................................................................................................................4
Section I: Introduction and Overview of Noise Analysis Methods................................................................ 4
Noise Analysis System Details....................................................................................................................... 6
Summary and Conclusions: Section I ..........................................................................................................12
References Cited........................................................................................................................................... 13
Acknowledgements ...................................................................................................................................... 13
Section II: System Description and Installation Instructions ....................................................................... 15
Figures
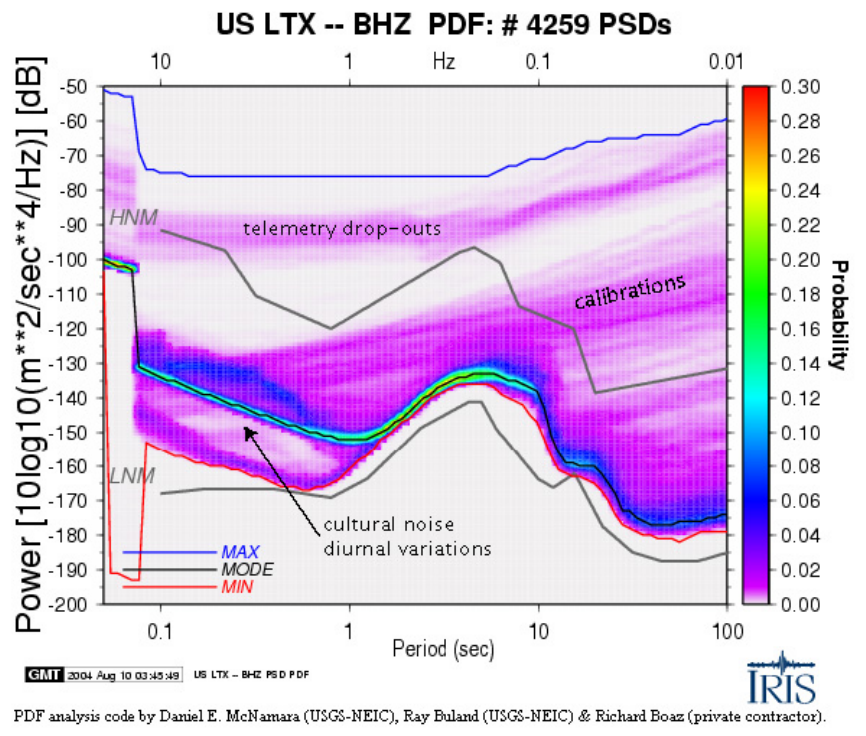
1. PDF example for LTX BHZ, with some artifacts and signals identified ................................................... 6
2. SDCO BHZ July 28, 2002, 06:00:00, PSD. Powers are averaged over full octaves in 1/8 octave
intervals. Center points of averaging are shown .............................................................................. 10
3. Histograms of powers, in 1dB bins, at four separate period bands for station AHID BHZ..................... 11
4. HLID - Typical ANSS station ~10km from Hailey Idaho .......................................................................14
iii

Seismic Noise Analysis System Using Power
Spectral Density Probability Density
Functions—A Stand-Alone Software Package
By D. E. McNamara and R.I. Boaz
1
Abstract
In this U.S. Geological Survey open-file report, we detail the methods and installation
procedures for a stand-alone noise analysis software package. The noise analysis system
is based on the calculation of the distribution of power spectral density using a
probability density function. Following the successful implementation of the noise
analysis system, at both the Incorporated Research Institutions in Seismology Data
management system in Seattle, Washington, and the Advanced National Seismic System
Data Collection Center in Golden, Colorado, we the system will be available to the
seismic community in a stand-alone form. This will allow users in the broader seismic
community the opportunity to perform their own analyses on data sets not held by either
of these two data centers. Potential users might include regional earthquake monitoring
network operators, portable experiment investigators and researchers and students
interested in the quality and noise characteristics of a particular data set. Results from this
noise analysis display the frequency dependent power distribution of the entire data set
and are useful for characterizing the performance of existing broadband stations, for
detecting operational problems, and for learning about sources of seismic noise within a
data set.
This report is divided in two sections. Section I describes how to acquire the noise
analysis software system and details data preparation and processing as well as the noise
analysis calculations and methods. Section II is a detailed description of the software
system. It will be useful to users interested in detailed installation instructions and a
complete description of the system directory structure and operations.
Section I: Introduction and Overview of Noise Analysis
Methods
A new stand-alone system for analyzing data quality is available to the seismology
community allowing users to evaluate the long-term seismic noise levels for broadband
seismic data in miniSEED format. The new noise processing software uses a probability
density function (PDF) to display the distribution of seismic power spectral density
(PSD) (PSD method after Peterson, 1993) and can be implemented against any
broadband seismic data with well known instrument responses. The software system is
currently running for routine noise monitoring at the United States Geological Survey’s
(USGS) Advanced National Seismic System (ANSS) National Operations Center (NOC)
1
Boaz Consultancy
4
and at the Incorporated Research Institutions in Seismology’s (IRIS) Data Management
Center ( DMC). For PDF plots from these two installations see:
http://geohazards.cr.usgs.gov/staffweb/mcnamara/ANSSPDFweb/ANSSPDFweb.html
and
http://www.iris.washington.edu/servlet/quackquery/
Software Availability
The new stand-alone software package is available on the world wide web (WWW)
and on the USGS ANSS anonymous ftp server. To download a compressed tar ball of the
software system, go to the following website and follow the downloading instructions.
http://geohazards.cr.usgs.gov/staffweb/mcnamara/Software/PDFSA.html
The download includes complete documentation on installing and running the noise
processing system. It also includes several reference documents on interpreting the noise
PDF plots (for example, McNamara and Buland, 2004).
Noise Analysis System Overview
This noise processing system is unique in that there is no need to screen the data
for earthquakes, system glitches, or general data artifacts as is commonly done in seismic
noise analysis. Instead with this new analysis, system transients map into a low-level
background probability while ambient noise conditions reveal themselves as high
probability occurrences. In fact, examination of artifacts related to station operation and
episodic cultural noise allows the user to estimate the overall station quality and a
baseline level of earth noise at each site. PDF noise plots are useful for characterizing the
current and past performance of existing broadband sensors, for detecting operational
problems within the recording system, and for evaluating the overall quality of data for a
particular station. The advantages of this new approach include:
(1) an analytical view representing the true ambient noise levels rather than a
simple absolute minimum,
(2) an assessment of the overall health of the instrument/station, and
(3) an assessment of the health of recording and telemetry systems.
Employing the algorithm used to develop the USGS Albuquerque Seismological
Laboratory (ASL) low noise model (LNM;
Peterson, 1993), we compute the PSD for
broadband data in the following manner. Hour-long, continuous, and over-lapping (50
percent) time-series segments are processed. There is no removal of earthquakes, system
transients and(or) data glitches. The instrument transfer function is removed from each
segment, yielding ground acceleration (for easy comparison to the LNM). Each hour-
long time series is divided into 13 segments, each about 15 minutes long and overlapping
by 75 percent, with each segment processed by removing the mean; removing the long
period trend; tapering using a 10 percent sine function; and transforming using an FFT
algorithm (Bendat and Piersol, 1971). Segments are then averaged to provide a PSD for
each 1-hour time series segment. For each channel, raw frequency distributions are
constructed by gathering individual PSDs in the following manner: binning periods in 1/8
octave intervals and binning power in 1 dB intervals. Each raw frequency distribution bin
is normalized by the total number of PSDs to construct a PDF. The probability of
occurrence of a given power at a particular period is plotted for direct comparison to the
Peterson high and low noise models (HNM, LNM) (see Fig. 1, LTX BHZ). Also
5
computed and plotted are the minimum (red line), mode (black line), and maximum (blue
line) powers for each period bin. A wealth of seismic noise information can be obtained
from this statistical view of broadband seismic noise.
Figure 1
Figure 1. PDF example for LTX BHZ, with some artifacts and signals identified. Station
LTX - Lajitas TX, was instrumental in the original Peterson Low Noise Model (Peterson,
1993); however, due to increased cultural noise (0.1-1s, 1-10Hz) the highest probability
power levels (mode, black line) are now significantly higher than the Peterson low noise
model (LNM). The minimum (red line) will approach the LNM <2 percent of the time
indicating that the station minimum does not reflect actual ambient noise conditions
across the whole spectrum. Instead, ambient noise conditions are better represented by
the highest probability mode (black line).
6

Noise Analysis System Details
Data Preparation and Processing
The approach of this noise analysis method differs from many previous noise studies
in that we make no attempt to screen the continuous waveforms to eliminate body and
surface waves from earthquakes or transients and instrumental glitches such as data gaps,
clipping, spikes, mass recenters, or calibration pulses. These signals are included in our
processing because they are low-probability occurrences that do not contaminate high-
probability ambient seismic noise observed in the PDFs (see below for details). In fact,
transient signals often are useful for evaluating station performance. Also, eliminating
this event-triggering and removal stage has the benefit of significantly reducing the PSD
computation time by simplifying data pre-processing.
The algorithm used to develop the Albuquerque Seismological Laboratory (ASL) new
low noise model (NLNM) and new high noise model (NHNM) (Peterson, 1993; Bendat
and Piersol, 1971) is used to calculate PSDs for all stations in this study. The processing
steps are detailed below.
Record length. Let a finite length seismic time series, u(t), have N evenly sampled
points at an interval of
Δ
t. For our analysis, we parse continuous time series, for each
station component, into 1-hour (T
h
=3600s) finite-length time series segments,
overlapping by 50 pecent, distributed continuously in time. Overlapping time series
segments are used to reduce variance in the PSD estimate (Cooley and Tukey, 1965). For
this example, we assume that for the broadband seismic data, each 3600s times series
segment is sampled at 40 sample per second (sps), such that
Δ
t••••••s, for a total
N=144,000 data points.
Preprocessing. The PSD preprocessing of each 1-hour time segment consists of
several operations. First, to significantly improve the Fast Fourier Transform (FFT) speed
ratio, by reducing the number of operations, the number of samples in the time series, N,
is truncated to the next lowest power of two, 2
17
, leaving N=131,072, thereby reducing the
series length such that T
h
=3276.8s. Second, in order to further reduce the variance of the
final PSD estimates, each roughly 1-hour time series record is divided into 13 segments,
overlapping by 75 percent, where the length of each new time series segment is now,
T
r
=T
h
/4=819.2s with N=32,768=2
15
. The sample size N is chosen based on the longest
period of interest, T
l
, (lowest frequency, fl). In general, the record length, T
r
=N
Δ
t, is
chosen such that it is 10 times the longest resolvable period, T
l
. Given this,T
l
,=1/f
l
=
T
r
/10=90s. The shortest period, Ts, (highest frequency, fh) is equivalent to the Nyquist
folding frequency, fc=1/2•t=20Hz, and is given by Ts = 1/fc
≤
1/fh
≤
0.05s.
Third, in order to minimize long-period contamination, the data are transformed to a
zero mean value, and any long period linear trend is removed by the average slope
method. If u
n
are the data values in the time series u(t) of length T
r
and N samples, the
data mean is given by:
(1)
mean
u
=
1
N
n
u
n=1
N
∑
Long period trend, T
lp
, is defined as any frequency component whose period is longer
than the record length, T
r
, and is defined as:
7

(2)
Tlp =
u
α
t −
Tr
2
⎛
⎝
⎜
⎞
⎠
⎟
where 0
≤
t
≤
T
r
and
(3)
u
α
=
1
Tr
3
⎛
⎝
⎜
⎞
⎠
⎟
2Tr
3
⎛
⎝
⎜
⎞
⎠
⎟
u(t)dt − u(t)dt
0
Tr
3
∫
2Tr
3
Tr
∫
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
If trends are not eliminated in the data, large distortions can occur in spectral
processing by nullifying the estimation of low frequency spectral quantities. Subtracting
(1) and (2) from the original time series, u(t), produces a new time series , u(t), that has
zero mean and long period trends removed: (4)
x
(
t
)
=
u(
t
)
−
mean
u
−
Tlp
Fourth, to suppress side lobe leakage in the resulting FFT, a 10 percent sine taper is
applied to the ends of the time series, x(t). We define a new tapered time series, y(t), such
that:
y(t) = x(t) * sin(••••r * t) 0
≤
t
≤
Tr/10
y(t) = x(t) Tr/10
≤
t
≤
(Tr-Tr/10) (5)
y(t) = x(t) * sin(••••r * (Tr-t)) (Tr-Tr/10)
≤
t
≤
Tr.
Tapering the time series has the effect of smoothing the FFT and minimizing the effect of
the discontinuity between the beginning and end of the time series. The time series
variance reduction can be quantified by the ratio of the total power in the raw FFT to the
total power in the smoothed filter (1.142857) and will be used to correct absolute power
in the final spectrum (Bendat and Piersol, 1971).
Power Spectral Density
The standard method for quantifying seismic background noise is to calculate the
noise PSD. The most common method for estimating the PSD for stationary random
seismic data is called the direct Fourier transform or Cooley-Tukey method (Cooley and
Tukey, 1965). The method computes the PSD via a finite-range fast Fourier transform
(FFT) of the original data and is advantageous for its computational efficiency.
The finite-range Fourier transform of a periodic time series y(t) is given by:
(6)
Y( f ,T ) = y(t)
0
Tr
∫
e
− i2
π
ft
dt
where the number of frequency amplitude estimates nfft=(N/2)+1=16385. For discrete
frequency values, f
k
, the Fourier components are defined as:
(7)
Yk =
Y(
f
k,T )
Δ
t
8

For , f
k
=k/N•t when k = 1, 2, …, N-1.
Hence, using the Fourier components defined above, the total power spectral density
estimate is defined as: (8)
P
k =
2
Δ
t
N
Yk
2
As is apparent from (8), the total power, P
k
, is simply the square of the amplitude
spectrum with a normalization factor of 2
Δ
t/N. The PSD process is repeated for each of
the 13 separate overlapping time segments within the one-hour record. After all 13
segment PSD estimates are computed, powers are averaged for q=13 separate time
segments, where each time segment is of length T
r
. The final smooth PSD estimate is
given by:
(9)
Pk =
1
q
P
k,1
+ P
k,2
+... + P
k ,q
(
)
where P
k,q
is the raw estimate at frequency f
k
of the qth time segment. Due to segment
averaging, the quantity P
k
has 2q=26 degrees of freedom giving a 95 percent level of
confidence that the spectral point lies within –2.14dB to +2.87dB of the estimate
(Peterson, 1993).
At this point we correct P
k
for the 10 percent sine taper applied earlier in the
processing such that P
k
= P
k
*1.142857 and then deconvolve the seismometer instrument
response by dividing the PSD, P
k
, estimate by the instrument transfer function to
acceleration, in the frequency domain. Finally, we convert the smoothed PSD estimate
into decibels (dB) with respect to acceleration (m/s
2
)
2
/Hz, for direct comparison to the
NLNM,by:
P
k
= 10*log
10
(P
k
). (10)
Limitations. The PSD technique described above provides stable spectra estimates
over a broad range of periods (0.05-90s); however, it suffers from poor time resolution
due to the long transforms and requires hundreds to thousands of hours of data to compile
good statistics for the PDFs. For better resolution at shorter periods, a larger number of
shorter records should be analyzed. Future work will investigate methods to improve
resolution of higher frequencies.
Probability Density Functions
Our goal is to get a sense of the true variation of noise at a given station. We do this by
generating seismic noise PDFs from the PSDs processed by using the methods discussed
in the previous section. In order to adequately sample the PSDs, full octave averages are
taken in 1/8 octave intervals. This procedure reduces the number of frequencies by a
factor of 169 from nfft=16,385 to 97. Thus, power is averaged between a short period
(high frequency) corner, T
s
, and a long period (low frequency) corner of T
l
=2*T
s
, with a
center period, T
c
, such that T
c
=sqrt(T
s
*T
l
) is the geometric mean period within the octave.
The geometric means are evenly spaced in log space. The average power for that octave,
period range from T
s
to T
l
, is stored with the center period of the octave, T
c
, for future
0.125
analysis. T
s
is incremented by one 1/8 octave such that T
s
= T
s
*2 , to compute the
9

average power for the next period bin. T
l
and T
c
are recomputed, powers are averaged
within the next period range T
s
to T
l
, and the process continues until we reach the longest
resolvable period given the time series window length of the original data, T
r
/10 (Fig. 2).
This process is repeated for every 1-hour PSD estimate, resulting in thousands of smooth
PSD estimates for each station-component. Powers are accumulated in 1 dB intervals to
produce frequency distribution plots (histograms), for each period (Fig. 3).
Period (sec)
PSD 10*log10 m**2/s**4/Hz dB
-180
-160
-140
-120
-100
NLNM
NHNM
SDCO BHZ July 28, 2002 06:00:00 PSD
Figure 2. SDCO BHZ July 28, 2002, 06:00:00, PSD. Powers are averaged over full
octaves in 1/8 octave intervals. Center points of averaging are shown.
10

500
100
200
300
400
-200 -180 -160 -140 -120 -100 -8
0
Power [10log10(m**2/s**4)] dB
number of occurrences
0.1 sec
1.0 sec
10.0 sec
100.0 sec
Period
Figure 3. Histograms of powers, in 1dB bins, at four separate period bands for station
AHID BHZ.
The next step is to plot the distribution of powers per period, as observed in figure 3,
using a probability density function (PDF). The PDF, for a given center period, T
c
, can
be estimated as:
P(T
c
) = N
PTc
/N
Tc
(11)
where N
PTc
is the number of spectral estimates that fall into a 1 dB power bin, P, with a
range from –200 to –80 dB, and a center period, T
c
. N
Tc
is the total number of spectral
estimates over all powers with a center period, T
c
. We then plot the probability of
occurrence of a given power at a particular period for direct comparison to the high and
low noise models (Figs. 1 and 4) (Peterson, 1993). We also compute and plot the
minimum, mode, and maximum powers for each period bin. A wealth of seismic noise
information can be obtained from this statistical view of broadband PDFs as discussed in
the following section.
Characterizing Sources of Noise and Signal in the PDFs
Cultural Noise. The most common source of seismic noise is from the actions of
human beings at or near the surface of the Earth. This often is referred to as “cultural
11
noise” and primarily originates from the coupling of traffic and machinery energy into
the earth. Cultural noise propagates mainly as high-frequency surface waves (>1-10Hz,1-
0.1s) that attenuate within several kilometers in distance and depth. For this reason,
cultural noise generally is significantly reduced in boreholes, deep caves, and tunnels.
Cultural noise shows very strong diurnal variations and has characteristic frequencies
depending on the source of the disturbance (Figs. 1 and 4). Another source of noise with
a strong diurnal is from thermal instabilities. Heating during the day and cooling at night
can cause ground fluctuations that induce tilt and long-period noise.
Earthquakes. Our approach differs from many previous noise studies in that we make
no attempt to screen the continuous waveforms to eliminate body and surface waves from
naturally occurring earthquakes. Earthquake signals are included in our processing
because they are low-probability occurrences even at low power levels (small magnitude
events) compared to the ambient conditions at the seismic station. We are interested in
the true noise that a given station will experience; therefore we include all input signals.
For example, including earthquakes tells us something about the probability of
teleseismic signals being obscured by small local events as well as various noise sources.
Large teleseismic earthquakes can produce powers above ambient noise levels across the
entire spectrum and are dominated by surface waves >10s, while small events dominate
the short period, <1s. Earthquakes are observed in the PDFs as low probability smeared
signal at short and long periods (Fig. 4).
System Artifacts. Since we make no attempt to screen waveforms for system
transients such as data gaps and sensor glitches, the PDF plots contain numerous system
generated artifacts that can be very useful for network quality-control purposes. We have
attempted to determine the source of several coherent, high power, low-probability noise
artifacts in the PDF plots. Several artifacts in the PDFs are easily explained and may be
useful to the network operator. For example, data-gaps (due to telemetry dropouts) and
automatic mass recenters (necessitated by “drift” in sensor mass position) are easily
identifiable in the PDFs. Should the probability of mass recentering and(or) telemetry
dropouts drastically increase, a remote network operator could readily diagnose the
problem (Figs. 1 and 4). Additional features and artifacts observed in the PDFs are
described online at:
http://geohazards.cr.usgs.gov/mcnamara/PDFweb/Noise_PDFs.html
and in McNamara and Buland (2004).
Summary and Conclusions: Section I
We have presented a new method for more realistically evaluating ambient seismic
noise levels at a station based on the PSD methods used to generate the NLNM of
Peterson (1993). This approach is useful because seismic stations exhibit considerable
variations in noise levels as a function of time of day, season, location, and installation
type. This type of information is not readily observed when only minimum noise levels
are analyzed. The results of this type of background noise analysis are useful for
characterizing the performance of existing stations, for detecting operational problems,
and should be relevant to the future siting of broadband seismic stations. Details on
software system installation and operations will be discussed in Section II.
12
References Cited
Bendat, J.S. and A.G. Piersol, 1971, Random data: analysis and measurement procedures.
John Wiley and Sons, New York, 407p.
Cooley, J.W., and J. W. Tukey, 1965, An algorithm for machine calculation of complex
Fourier series, Math. Comp., 19, p. 297-301.
McNamara, D.E. and R.P. Buland, 2004,
Ambient Noise Levels in the Continental
United States
, Bull. Seism. Soc. Am., 94, 4, 1517-1527.
Peterson, J., 1993, Observation and modeling of seismic background noise,
U.S. Geol.
Surv. Tech. Rept., 93-322
, 1-95.
Wessel, P. and W. Smith, 1991, Free software helps display data, EOS, 72, 445-446.
Acknowledgements
The algorithm and initial software was first developed by Dan McNamara and Ray
Buland, with contributions from Harold Bolton and Paul Earle, at the United States
Geological Survey (USGS) as a part of the ANSS quality-control (QC) system. Further
development, supported by IRIS through funds it receives from the National Science
Foundation (NSF) allowed for Richard Boaz to develop the system for implementation
against the real-time BUD dataset and the real-time data stream at the USGS ANSS
NOC. Additional support was provided by the USGS to produce the stand-alone software
package discussed in this report. PDF plots are generated with the GMT plotting tools
(Wessel and Smith, 1991). Appropriate citation for this noise analysis method is
McNamara and Buland (2004) (see references).
13

Figure 4. HLID - Typical ANSS station ~10km from Hailey Idaho. Automobile traffic
along a dirt road only 20 meters from station HLID creates a 20-30dB increase in power
at about 0.1 sec period (10Hz). This type of cultural noise is observable in the PDFs as a
region of low probability at high frequencies (1-10Hz, 0.1-1s). Body waves occur as low
probability signal in the 1-sec range while surface waves are higher power at longer
periods. Automatic mass recentering and calibration pulses show up as low probability
occurrences in the PDF.
14
Section II: System Description and Installation Instructions
Table of Contents
Introduction __________________________________________________________ 1
Quick Install _________________________________________________________ 1
Audience ____________________________________________________________ 1
Scope _______________________________________________________________ 1
Acknowledgments _____________________________________________________ 1
Authorship ___________________________________________________________ 1
References ___________________________________________________________ 1
PDF Analysis System Overview____________________________________________ 2
Description __________________________________________________________ 2
Requirements_________________________________________________________ 2
Hardware __________________________________________________________ 2
Software ___________________________________________________________ 3
PDF Source Code Organization __________________________________________ 3
Input and Output Files ___________________________________________________ 3
Input________________________________________________________________ 3
Output ______________________________________________________________ 5
System Configuration ____________________________________________________ 5
Data Directories_______________________________________________________ 6
MiniSeed Data Directory and Files ______________________________________ 6
Response File Directory_______________________________________________ 6
Web Directory ______________________________________________________ 7
Script Variables _______________________________________________________ 8
Source Code Header File Modification_____________________________________ 8
System Compilation and Installation ________________________________________ 8
Compilation __________________________________________________________ 8
Compiler Options____________________________________________________ 8
Installation ___________________________________________________________ 9
PDF System Execution ___________________________________________________ 9
Channel-Specific Shell Script ____________________________________________ 9
Overall Execution ____________________________________________________ 10
E
xecution Features ___________________________________________________ 10
Error Processing______________________________________________________10
Release Notes _________________________________________________________ 11
Current Limitations ___________________________________________________ 11
Version Control ______________________________________________________ 11
Version 1.1 ________________________________________________________ 11
Appdendix I – File Formats ______________________________________________ 11
Djjj.bin File _________________________________________________________ 11
Hour.idx File ________________________________________________________ 11
Hjjj.bin File _________________________________________________________ 12
PDFAnalysis.bin File _________________________________________________ 12
PDFAnalysis.inf File __________________________________________________ 12
PDFanalysis.sts File __________________________________________________ 12
PDFAnalysisSR.bin File _______________________________________________ 13
Appendix II – Installation and Configuration Checklist__________________________ 1
15

PDF Analysis System – Stand Alone Installation
Introduction
Following from the successful implementation of the PDF Noise Analysis System at the IRIS DMC in
Seattle, Wash., and at the NEIC in Golden, Colo., it is desired to provide the system to the seismic
community in a stand-alone form. The stand-alone software package will allow seismic community users
the opportunity to perform their own analyses against data sets not held by the two data centers.
Quick Install
If the time required to read and understand this document in total is unavailable (but you’d like it installed
and working as quickly as possible), you must at least read the sections System Configuration, System
Compilation and Installation, and PDF System Execution and follow the steps outlined there. Where
problems occur, be certain to consult the other various sections of this document that may provide further
information to solve your issue.
Audience
This document is intended for all users of the siesmic community with an interest in producing noise
analyses of seismic data following the algorithm laid out by McNamara and Buland of the USGS ANSS
National Operations Center (NOC) in Golden, Colo.
Scope
This document is limited to the technical aspects of the PDF Analysis System: installation, configuration,
and execution. As such, it does not treat the functional aspects of the system: methodologies, algorithm,
philosophy, interpretation possibilities, usage of results, etc. For a complete discussion of these and more,
please consult the various documents listed below.
Acknowledgments
The following parties have significantly contributed to the development of this system and are hereby
acknowledged thus:
Party Contribution
Ray Buland and Daniel
McNamara (of USGS
NEIC, Golden, CO)
Provided the original algorithm and proof-of-concept implementation
USGS NEIC Provided the funds for original development of algorithm.
NSF Provided funds for original system development of generic implementation at
the IRIS Data Management Center (Seattle, Wash).
IRIS Sponsored the development of the generic implementation at the DMC.
Bruce Weertman (of
IRIS)
Responsible for integration of the PDF system within the IRIS DMC’s Quack
framework.
Authorship
This document and the PDF analysis system was written by Richard Boaz (of Boaz Consultancy:
http://www.boazconsultancy.com) and Dan McNamara (USGS). Any and all comments and(or) bug reports
are welcome and are encouraged to be forwarded to
riboaz@xs4all.nl.
References
The following table provides various references which may be of interest to the reader:
1

Description Name Location
Original Abstract
(Adobe pdf)
Ambient Noise Levels in the
Continental United States
PDF Stand-Alone distribution docs directory
Power Point
Presentation
Noise Based Detection
Method for the ANSS
PDF Stand-Alone distribution docs directory
Discussion Paper
(Adobe pdf)
Determining True Global
Ambient Noise
PDF Stand-Alone distribution docs directory
PDF Analysis
Interpretation (html
document)
Ambient Noise Probability
Density Functions
PDF Stand-Alone distribution docs directory
PDF Analyses at the
USGS NEIC
USGS/ANSS Noise Monitor
http://geohazards.cr.usgs.gov/staffweb/mcnamara/
ANSSPDFweb/ANSSPDFweb.html
PDF Analyses at the
IRIS DMC
DMC QUACK Information
Query
http://www.iris.washington.edu/servlet/quackquery
/
PDF Analyses at the
IRIS DMC (US
Array)
DMC QUACK Information
Query
http://www.iris.washington.edu/servlet/quackquery
_us
Description
The PDF Analysis system is comprised of three separate processing components:
1. An analysis program (written in C), responsible for producing analysis statistics for a single
channel;
2. A shell program (using GMT) to convert the analysis results produced in step 1 to a plot, in the
form of a postscript format file;
3. Image manipulation (using ImageMagick) commands to convert the postscript file created in step
2 to an actual graphical image (.png format).
Execution is provided in the form of a shell script per channel to analyze, responsible for calling each of
these components in turn (see section PDF System Execution below for details).
Requirements
Hardware
No specific hardware requirements exist, per se. The program will execute on any platform supporting a C
compiler in addition to the other software requirements listed below.
Depending on which compile time output option is chosen (please see section System Compilation and
Installation: Compilation: Compile Options for a complete discussion of these options and their effects),
disk storage requirements are approximately the following (per channel analyzed):
2

Output Option
Maximum disk
storage requirement
No Daily or Hourly .bin output 5 Mb
Only Daily .bin output 15 Mb
Both Daily and Hourly .bin output 50 Mb
Software
The following table defines the software dependencies currently en force:
Software Version Description Available at
C Compiler User preference Compiler (program
developed under gcc)
http://gcc.gnu.org/
Scripting Bash shell Scripting tools Local machine executing analysis
GMT Latest available Plotting tool
http://gmt.soest.hawaii.edu/
ImageMagick Latest available Image manipulation tool
http://www.imagemagick.org/
PDF Source Code Organization
The following table defines the directories and files which make up the source tree of the PDF Analysis
System:
Directory/File Description
PDF Root system directory
PDF/PROD Production directory containing production relevant files
PDF/PROD/bin Directory containing shells and executables,
PDF/PROD/script Directory containing executable scripts
PDF/PROD/support Directory containing all necessary production support files
PDF/PROD/helper Directory containing helper scripts (system mgmt, etc.)
PDF/src Directory holding all source code:
• PDF analysis program
• GMT plotting script
• Execution scripts
PDF/src/vx.x.x Directory holding all source code for version x.x.x of the system
PDF/src/ vx.x.x/analysis Source code directory of analysis program (C code)
PDF/src/ vx.x.x/analysis/mseed Miniseed data file reader source code - as library to main()
PDF/src/ vx.x.x/analysis/resp Instrument response interpreter source code - as library to main()
PDF/src/ vx.x.x/GMT Directory holding GMT source code - scripts and support files
PDF/src/ vx.x.x/script Directory holding execution scripts
Input and Output Files
Input
The following table defines the directories and files which are required input, see sections System
Configuration and PDF System Execution for full description of specification and use:
3

Directory/File Description
Data Directory Directory holding the miniseed data files to be analyzed.
Note: All data files requiring analysis as part of a single execution
must reside in this single directory.
Miniseed Data Files Files to analyze, miniseed format only.
Analysis Directory Directory holding all output files.
See section Output for a complete description.
Response File Directory Directory holding response files for channels being analyzed.
See section System Configuration for a complete discussion on set-
up.
RESP.NTW.STN.LOC.CHN The file holding the response information for the instrument and
channel. This must be formatted as for input to the evresp() function
(format as produced by the rdseed program).
Where:
NTW is the network name
STN is the station name
LOC is the location identifier
CHN is the channel identifier
4

Output
The following table defines the directories and files which are created in the course of the PDF Analysis
execution. All are located as subdirectories to the analysis directory defined in the section Input above and
are automatically created in the course of execution. Please consult Appendix I – File Formats for a
detailed description of their contents.
Directory/File Description
NTW.STN.LOC.CHN.png Graphical representation of analysis.
Yyyyy Directory holding daily PSD .bin files, by year
Where:
yyyy is the year
Yyyyy/HOUR Directory holding the hourly PSD .bin files
LOG Directory holding the various log files created during the course of
execution.
wrk Directory holding various work files
Yyyyy/Djjj.bin Files holding individual day's PSD analysis results (currently unused,
for future use).
Where:
jjj is the julian day
Yyyyy/HOUR/hour.idx Index file to Hjjj.bin file.
Yyyyy/HOUR/Hjjj.bin Files holding individual hour's PSD analysis results (currently unused,
for future use).
LOG/NTW.STN.LOC.CHN.log Log file of analysis program.
LOG/plotGMT.log Log file of GMT plotting program.
LOG/convert.log Log file of ImageMagick convert program, nothing output for normal
execution.
LOG/NTW.STN.LOC.CHN.yyyy.jj
j.err
Analysis program error file, by year and julian day.
LOG/PDFanalysis.skp File listing those days when problems occurred, information only.
wrk/PDFanalysis.bin Cumulative dB-based .bin file, results to graph are contained here.
wrk/PDFanalysis.inf Information file holding various analysis settings.
wrk/PDFanalysisSR.bin Cumulative period-based .bin file.
Where:
SR is the sample rate of the channel
wrk/PDFanalysisSR.inf Information file as before, sample-rate specific.
wrk/PDFanalysis.sts File holding various statistics for analysis results, input to GMT.
wrk/PDFanalysis.ps GMT postscript file output, deleted upon conversion to .png file.
wrk/pdf.grd GMT temp file, deleted upon completion of GMT step.
System Configuration
Configuration of the PDF system amounts to the setup of various directories and script variables. This
section lays out these requirements for the PDF system setup to result in a successful installation and
subsequent execution. Failure to define these precisely as described herein will result in a nonfunctioning
system.
Appendix II provides a checklist for each parameter and variable which must be defined as part of system
setup. Please print, define the values accordingly, and supply them in their proper location.
5
Data Directories
MiniSeed Data Directory and Files
A directory is required to contain the miniseed data files to be analyzed. This directory and the miniseed
data files must adhere to the following:
1. All miniseed data files representing a single channel’s worth of waveform data, for all time, must
be contained within the same directory.
2. All miniseed data files must contain exactly (or as close to) 1 day’s worth of data, from 00:00
hours to 24:00 hours.
3. The directory structure must conform to the following conventions:
DATAROOT/NTW/STN
Where
DATAROOT is the root directory of the miniseed data files (script variable of such specified
below)
NTW is the name of the network
STN is the name of the station
4. The name of the miniseed file itself must conform to the following naming convention:
STN. NTW.LOC.CHN.yyyy.jjj
Where
STN is the name of the station
NTW is the name of the network
LOC is the location identifier
CHN is the channel identifier
yyyy is the year of the data file
jjj is the julian day of the data file
(Note: Where no location identifier exists, field should be null. This would render, for example, a
filename for station ATKA and network AK as: ATKA.AK..BHE.2004.261)
Assuming your directory structure and miniseed data files do not naturally conform to these requirements,
this directory structure and filenaming convention can be easily accommodated for through the following:
• Create the fixed directory structure itself: DATAROOT/NTW/STN
• For each miniseed data file, create softlinks (ln –s) to the actual/real miniseed data files such that
the naming convention above is adhered to.
Further, this can be automated via a script rendering this requirement as trivial as possible. Please see the
script linkMseed.US (located in pdf/PROD/helper/linkmseed) for an example and modify as necessary.
Because the filenaming convention uniquely identifies the channel of data, this directory may contain all
miniseed data file for all channels of a station. It is not necessary to create separate directories for each
channel, rather, a separate directory only for the station itself and containing the miniseed data files for all
channels.
Response File Directory
A directory must exist containing all response files used to deconvolve the signal back to absolute ground
motion in the course of analysis. This directory and the files themselves must adhere to the following:
1. The directory may be specified as per user desires/requirements. No specific directory structure
requirement exists. The directory holding these response files must be specified in two places: in
the script variable RESPDIR (see section Script Vaiables below), and within the PDFuser.h file
of the PDF analysis program source code (see section Source Code Header File Modification
below).
2. The filename of the response file must conform to the following naming convention:
RESP.NTW.STN.LOC.CHN
Where
RESP is exactly as specified: RESP
NTW is the name of the network
STN is the name of the station
LOC is the location identifier
CHN is the channel identifier
6
(Note: This naming convention follows from the response file output generated by the rdseed
program. As before, where no location identifier exists, field should be null.)
3. The internal format of the response file information must conform to the format produced by the
rdseed program, subsequently readable by evresp().
Web Directory
A directory must be created to collect all .png files created during the course of execution. The .png files
are contained in the analysis directory for the channel being analyzed, making collective viewing annoying
since all are held within disparate directories. This annoyance is alleviated through the existence of this
directory.
Create a directory for these to be contained in and define this location in the .vars-user file. With this
directory, the last action in the course of analysis is for a softlink to be created in this directory pointing to
the .png file found in the analysis directory.
Additionally, if it is desired to publish the results, it is this directory that can be made available to the web
in whatever manner/means appropriate.
7

Script Variables
The following script variables are installation specific and must be predefined by the user and provided in
the shell script file .vars-user (located in directory PDF) before the system can be installed. Failure to do
so will result in a non-functioning system.
Script variable name Description
PDFROOT Root directory of PDF analysis system (directory holding the .vars-user file)
WEBDIR Directory of collected .png files
RESPDIR Directory holding response files
DATAROOT Root directory of miniseed data files (parent to NTW/STN)
STATSROOT Root directory of PDF analysis results/statistics
GMTROOT GMT installation root directory
IMROOT ImageMagick installation root directory
Source Code Header File Modification
The sole configuration requirement within the source code of the PDF analysis program is the following
#define parameter to be specified: (Note: this must be the same as defined as part of the Script Variables
above.)
#define parameter Description Location
#define RESPDIR Directory holding response files,
inside quotes “”.
PDF/src/vx.x.x/analysis/PDFuser.h
System Compilation and Installation
Compilation
Compilation of the PDF Analysis program employs straightforward C/Unix standards, that is, a C compiler
and make. In addition to the analysis portion of the program, there are two subdirectories of libraries
requiring compilation as well. As such, a script is provided that will traverse each of these subdirectories,
making the dependent libraries in turn. This script is located in the PDF Analysis source directory and
conforms to the following invocation specifications:
makesh [ clean | all ]
where
clean will execute make clean, removing all dependent libraries and object files.
all will execute make all in each directory of the PDF analysis program, creating all dependent
libraries and object files necessary to ultimately link the PDF analysis executable.
Alternatively, the program may be built when installing the system as a whole, alleviating the need to
compile and link by hand. Please see the section Installation below for details.
Compiler Options
Two compile-time options exist for the PDF Analysis program. Namely, defining whether or not daily
and(or) hourly PSD information is output. (Please see section Requirements: Hardware for detailed
overall disk storage requirements.)
With daily PSD information output, cumulative .bin files are generated for each day analyzed (amounting
to ~30Kb/day/channel analyzed).
With hourly PSD information output, .bin files are generated for each hour analyzed (amounting to
~100Kb/day/channel analyzed).
The system is delivered, by default, to output daily and hourly .bin files. Output of this data is anticipated
to be used in future versions of the software, such that existence of these files will allow PDFs to be
produced for specific user-defined time periods. For example, a PDF graph representing only the months
8

of January thru March or a PDF graph representing all months but only between the hours of 6AM and
6PM.
If it is anticipated that these more specific sorts of analyses will be of interest, no action is required, daily
and hourly .bin files will be generated.
If this is not desired, or disk space is an issue, both daily and hourly .bin file generation may be suppressed.
The following table defines these compile time options:
Compiler option Effect
-DNO_DAILY_PSD No daily PSD .bin files output
-DNO_HOURLY_PSD
No hourly PSD .bin files output
Either or both (they are mutually independent) of these options can be specified in the CFLAGS section of
the Makefile for the main PDF Analysis program. The resulting executable will subsequently NOT output
incremental PSD information.
Since these are compiler options, these settings have a system-wide influence, that is, these options cannot
be implemented on a per channel basis. (One way around this, however, would be to install more than a
single system.)
Installation
Installation is provided via the shell script installPDF located in the directory PDF and provides for the
following functionality:
1. optionally compiles the PDF Analysis program,
2. copies all relevant files to the PROD directory, and
3. conforms to the following usages:
command: installPDF –h
output: Usage: install [-h] [make] version#
description: prints the usage for the command.
command: installPDF v1.1
output: Copying v1.1 executables and support files to PROD dir…
description: installs all relevant executables, scripts and support files for version# to the PROD
directory structure. (Note: command line argument version# must be as specified in the
PDF source directory structure.)
command: installPDF make v1.1
output: Compiling v1.1 PDF Analysis program…
Copying v1.1 executables and support files to PROD dir…
description: as for command installPDF v1.1, however, cleans and compiles the PDF analysis
program before copying and installing to the PROD directory structure (recommended
for first install since no object files exist as part of delivery).
PDF System Execution
System execution comes in the form of two scripts, executePDF and PDFscript (both located in
PDF/PROD/bin).
PDFscript is a shell script template used to create the individual channel-specific execution script. This
script is ultimately responsible for the PDF analysis execution of a specific channel.
The executePDF script executes all channel-specific scripts located in PDF/PROD/script in turn.
Channel-Specific Shell Script
Execution of the PDF Analysis System is provided in the form of a shell executable script (PDFscript)
responsible for carrying out the three steps of execution described in section PDF Analysis System
Overview: Description. This execution script is created by replacing various strings in the generic file
PDFscript with execution-specific values, thus creating a unique script for each channel to be analyzed.
This channel-specific executable shell can be easily created using the following shell script command:
makePDFscript NTW STN LOC CHN
9

where
NTW is the network name
STN is the station name
LOC is the location identifier (use -- for no location)
CHN is the channel identifier
This will create the channel-specific script to be executed, named NTW.STN.LOC.CHN.sh and saved to the
directory PDF/PROD/script. In addition, the analysis directory will be created if it does not exist (assuming
the STATSROOT directory exists).
Once this script has been created for a specific channel, it can be executed repeatedly (daily, weekly,
monthly, as desired) to update the analysis results.
Overall Execution
Executing the script executePDF will result in all scripts located in PDF/PROD/script to be executed in
turn. Specifically, it will execute all files having “.sh” as their filename suffix. Thus, individual analyses
can be turned on and off by renaming the suffix of the executable script in question.
A simple logfile of executePDF, detailing the channels analyzed, is generated and written to the file
PDF/PROD/LOG/PDF.log.
Further, this process may be automated by using the UNIX crontab command. At specified times, merely
execute the executePDF script, and all analyses will be performed and updated.
Execution Features
Please note the following features of the PDF analysis system:
1. Analysis is performed against all data files found in the specified data directory only up to and
until 2 days prior to analysis execution date. This allows for systems where data availability can
suffer up to 2 days of latency.
2. The program does cross the day boundary to analyze the last hour of data held within the miniseed
files. As such, the last file identified for analysis is not fully analyzed; it is treated in subsequent
executions.
3. When crossing the day boundary, program assumes data are coincident if ending time and starting
time of respective miniseed files differ by less than one sample (1) of time. Where data are
identified not to be coincident, an error message is output to the channel-specific log file.
Error Processing
Error handling is very much dependent on the type of error encountered. The following table lists the
major errors that may be encountered, how each is handled, and suggested follow-up action.
Error Type How handled User follow up
Response File not
found
Fatal Analysis execution suspended;
error message written to Log file
Provide proper response file, verify
naming convention is adhered to.
Response
Information not
found
Fatal Analysis execution suspended;
error message written to Log file
Provide file containing response
information for appropriate
date/time range, verify file format is
adhered to.
Error reading
miniseed data file
Nonfatal Analysis execution skips this
day of data; error message
written to day-specific error file
located in LOG directory of
analysis output.
Determine if miniseed data file can
be repaired.
Internal
Processing Error
Fatal Analysis execution suspended Contact riboaz@xs4all.nl with all
relevant information
No files ever
found to analyze
Nonfatal Program successfully executes
but nothing analyzed
Verify miniseed directory structure
and filenaming conventions are
adhered to.
10

Unable to create
or access
directories
Fatal Analysis execution suspended Confirm existence and access
permissions of directory in question.
Release Notes
Current Limitations
The limitations are defined to be:
1. Unable to analyze long period channels, limited to 20 samples/sec or more,
2. unable to provide analysis for user-defined time periods, only analysis of all data available is
currently provided for,
3. output provided to end-user currently limited to .png graphical file format, and
4. unable to analyze any data prior to the last day analyzed. This means that the program cannot fill
in gaps nor replace the results of previously analyzed data. This will be treated in a future release.
Version Control
This section defines the current and historical releases of the PDF Analysis System.
Version 1.1
Release Date: 29 October 2004
Modifications
1. Stand-alone version created and made available for general release.
Appdendix I – File Formats
This appendix defines the formats of the various files produced by the PDF analysis system.
Djjj.bin File
Definition: Cumulative db-based .bin file holding daily PSD analyses for julian day jjj.
Directory: Yyyyy
Internal Format:
• Data Format: ASCII
• Individual lines each defining:
FREQ POWER #HITS
Where:
FREQ is the frequency (in Hz)
POWER is the power bin (in dB)
#HITS is the number of times
Hour.idx File
Definition: Index file to Hjjj.bin file, index defined by julian day and HH:MM start time of PSD.
Directory: Yyyyy/HOUR
Internal Format:
• Data Format: ASCII
• Individual lines each containing:
JDAY HH:MM REF
Where:
JDAY is the julian day
HH:MM is the hour and minute start time of the PSD
REF is the reference identifier, for accessing/extracting from the Hjjj.bin file
11

Hjjj.bin File
Definition: Cumulative db-based .bin file holding hourly PSD analyses for julian day jjj.
Directory: wrk
Internal Format:
• Data Format: ASCII
• Individual lines each containing:
REF FREQ POWER
Where:
REF is the reference identifier from the hour.idx file
FREQ is the frequency (in Hz)
POWER is the power bin (in dB)
PDFAnalysis.bin File
Definition: Cumulative db-based .bin file holding overall PSD probabilities for julian day jjj.
Directory: wrk
Internal Format:
• Data Format: ASCII
• Individual lines each defining:
FREQ POWER PROB
Where:
FREQ is the frequency (in seconds)
POWER is the power bin (in dB)
PROB is the normalized (to probability) number of hits
PDFAnalysis.inf File
Definition: Information file containing various settings/values pertaining to analysis.
Directory: wrk
Internal Format:
• Data Format: ASCII
• Individual lines each defining:
VALUE :SETTING
• With the following SETTINGs currently being provide for, appearing in the following order:
Setting Definition
Analysis Start Date Start day of the analysis (format: YYYY:JJJ)
Analysis Stop Date Stop day of the analysis (format: YYYY:JJJ)
Total Number of Days Total number of days analyzed
Total Number of PSD's Total number of PSD’s making up the analysis
Total Number of
Problem Days
Total number of days encountering a problem
(information only)
SAMPLE RATE Sample rate of the channel
NETWORK Network name
STATION Station name
LOCATION Location identifier
CHANNEL Channel identifier
NYQUIST Nyquist value for this analysis
PDFanalysis.sts File
Definition: File holding various statistics for this analysis.
12
Directory: wrk
Internal Format:
• Data Format: ASCII
• Individual lines each defining:
FREQ MIN AVE 50% 90% MAX MODE
Where:
FREQ is the frequency in question (in Hz)
MIN is the minimum PSD value
AVE is the average PSD value
50% is the 50th percentile PSD value
90% is the 90th percentile PSD value
MAX is the maximum PSD value
MODE is the mode PSD value (most common)
PDFAnalysisSR.bin File
Definition: Cumulative db-based .bin file holding overall PSD for julian day jjj.
Directory: wrk
Internal Format:
• Data Format: ASCII
• Individual lines each defining:
FREQ POWER PROB
Where:
FREQ is the frequency (in Hz)
POWER is the power bin (in dB)
PROB is the number of hits for this bin
13
Appendix II – Installation and Configuration Checklist
This appendix contains a table listing all of the required configuration parameters. Please print this page, it provides
the appropriate values to be used. Confirm that all values have been properly defined in the specified file(s).
Config
parameter
Description Where specified Value
PDFROOT Root directory of PDF
analysis system
PDF/.vars-user file
WEBDIR Directory of .png files
accessible from www
PDF/.vars-user file
RESPDIR Directory containing
response files
PDF/.vars-user file
DATAROOT Root directory of miniseed
data files
PDF/.vars-user file
STATSROOT Root directory of PDF
analysis results
PDF/.vars-user file
GMTROOT GMT installation root
directory
PDF/.vars-user file
IMROOT ImageMagick installation
root directory
PDF/.vars-user file
RESPDIR Directory containing
response files
PDF/src/vx.x.x/analysis/PDFuser.h
1

{kind=link}