
Robotics: Science and Systems 2023
Daegu, Republic of Korea, July 10-July 14, 2023
1
Robotic Table Tennis: A Case Study
into a High Speed Learning System
David B. D’Ambrosio
∗
, Jonathan Abelian
†
, Saminda Abeyruwan
∗
, Michael Ahn
∗
, Alex Bewley
∗
,
Justin Boyd
†
, Krzysztof Choromanski
∗
, Omar Cortes
†
, Erwin Coumans
∗
, Tianli Ding
∗
, Wenbo Gao
∗
,
Laura Graesser
∗
, Atil Iscen
∗
, Navdeep Jaitly
∗
, Deepali Jain
∗
, Juhana Kangaspunta
∗
, Satoshi Kataoka
∗
,
Gus Kouretas
‡
, Yuheng Kuang
∗
, Nevena Lazic
∗
, Corey Lynch
∗
, Reza Mahjourian
∗
, Sherry Q. Moore
∗
,
Thinh Nguyen
†
, Ken Oslund
∗
, Barney J Reed
§
, Krista Reymann
∗
, Pannag R. Sanketi
∗
, Anish Shankar
∗
,
Pierre Sermanet
∗
, Vikas Sindhwani
∗
, Avi Singh
∗
, Vincent Vanhoucke
∗
, Grace Vesom
∗
, and Peng Xu
∗
Authors beyond the first are listed alphabetically, with full author contributions in the Appendix.
∗
Google DeepMind.
†
Work done at Google DeepMind via FS Studio
‡
Work done at Google DeepMind via Relentless Adrenaline
§
Work done at Google DeepMind via Stickman Skills Center LLC
Fig. 1: The physical robotic table tennis system. Images from left to right show (I) ball thrower, (II) entire system (thrower,
arm, gantry), (III) automatic ball refill, (inlay) simulator, and (IV) robot mid-swing.
Abstract—We present a deep-dive into a real-world robotic
learning system that, in previous work, was shown to be capable
of hundreds of table tennis rallies with a human and has the
ability to precisely return the ball to desired targets. This system
puts together a highly optimized perception subsystem, a high-
speed low-latency robot controller, a simulation paradigm that
can prevent damage in the real world and also train policies for
zero-shot transfer, and automated real world environment resets
that enable autonomous training and evaluation on physical
robots. We complement a complete system description, including
numerous design decisions that are typically not widely dissem-
inated, with a collection of studies that clarify the importance
of mitigating various sources of latency, accounting for training
and deployment distribution shifts, robustness of the perception
system, sensitivity to policy hyper-parameters, and choice of
action space. A video demonstrating the components of the
system and details of experimental results can be found at
https://youtu.be/HbortM1wpAA.
1
I. INTRODUCTION
There are some tasks that are infeasible for a robot to
perform unless it moves and reacts quickly. Industrial robots
can execute pre-programmed motions at blindingly fast speeds,
but planning, adapting, and learning while executing a task
1
Corresponding emails: {bewley, ddambro, lauragraesser,
psanketi}@google.com.
at high speed can push a robotic system to its limits and
introduce complex safety and coordination challenges that may
not show up in less demanding environments. Yet many vital
tasks, particularly those that involve interacting with humans
in real time, necessitate such an high-speed robotic system.
The goal of this paper is to describe such a system and
the process behind its creation. Building any robotic system
is a complex and multifaceted challenge, but nuanced design
decisions are not often widely disseminated. Our hope is that
this paper can help researchers who are starting out in high-
speed robotic learning and serve as a discussion point for those
already active in the area.
We focus on a robotic table tennis system that has shown
promise in playing with humans (340 hit cooperative rallies)
[2] and targeted ball returns (competitive with amateur hu-
mans) [20]. This platform provides an excellent case study
in system design because it includes multiple trade-offs and
desiderata — e.g. perception latency v.s. accuracy, ease of use
v.s. performance, high speed, human interactivity, support for
multiple learning methods — and is able to produce strong real
world performance. This paper discusses the design decisions
that went into the creation of the system and empirically
validates many of them through analyses of key components.

Physics simulation Real world
Robot
control
Ball
modeling
Ball
vision
Robot
control
Collision
detection
State machine
Rewards
Observation
Data
interpolation
Observation
Safety
sim
collisions
Referee
Done
Info
P3 P4
P3
P2
P1
P2
P1
process
real only
sim only
shared
Px
Ball
thrower
P5
Robot Controller
Logger
Custom MPI
ThrowerVision
TF detection and
tracking on GPU
Control Server
PyBullet
(Safety)
egm_server
(driver)
festo_driver
(driver)
Camera reader
Camera
1
Camera
2
Motor 1
Motor 2
Motor 3
Abb Arm
Festo
Linear
Referee
Environment
Custom MPI
248Hz ~125Hz100Hz
Python
C++
Actor
pybind11
pybind11
IR
Sensor
Video Encoder
Device
Fig. 2: Overview of the components for running simulated and real environments. The diagram on the left shows how the
various software components fit to form the environment: in simulation, everything runs in a single process, but the real
environment splits the work among several. The diagram on the right shows the components of the real hardware system. A
custom MPI manages communication between the parts and logging of all data.
This work explores all aspects of the system, how they relate
to and inform one another, and highlights several important
contributions including: (1) a highly optimized perception
subsystem capable of running at 125Hz, (2) an example of
high-speed, low latency control with industrial robots, (3) a
simulation paradigm that can prevent damage in the real world
while performing agile tasks and also train policies for zero-
shot transfer using a variety of learning approaches, (4) a
common interface for simulation and real world deployment,
(5) an automatic physical environment reset system for table
tennis that enables training and evaluation for long periods
without human intervention, and (6) a research-friendly modu-
lar design that allows customization and component swapping.
A summary of widely applicable lessons can be found in Sec-
tion V and a video of the system in operation and experimental
results can be found at https://youtu.be/HbortM1wpAA.
II. TABLE TENNIS SYSTEM
Table tennis is easy to pick up for humans, but poses
interesting challenges for a robotic system. Amateurs hit the
ball at up to 9m/s, with professionals tripling that. Thus, the
robot must be able to move, sense, and react quickly just to
make contact, let alone replicate the precise hits needed for
high-level play.
The components of this system are numerous with many
interactions (Figure 2). Therefore, a major design focus was
on modularity to enable testing and swapping. At a high
level, the hardware components (cameras + vision stack, robot,
ball thrower) are controlled through C++ and communicate
state to the environment through a custom message passing
system called Fluxworks. The various components not only
send policy-related information this way (e.g. where the the
ball is, the position of the robot) but also synchronize the state
of the system (e.g. the robot has faulted or a new episode
has started). Note that this process is simplified in simulation
where all state information is centralized. Information from the
components determines the state of the game (in the Referee)
and input to the policy. The policy then produces actions which
feed into the low-level controllers while the game state drives
the system as a whole (e.g. the episode is over). All logging
(Appendix M), including videos, is handled with Fluxworks
which utilizes highly optimized Protobuffer communication.
The rest of this section describes the components in the
system and their dependencies and interactions.
A. Physical Robots
The player in this system consists of two industrial robots
that work together: an ABB 6DOF arm and a Festo 2DOF
linear actuator, creating an 8DOF system (Figure 1). The two
robots complement each other: the gantry is able to cover large
distances quickly, maneuvering the arm into an appropriate
position where it can make fine adjustments and hit the ball
in a controlled manner with the arm. The choice of industrial
robots was deliberate, to focus on the machine learning
challenges of the problem and for high reliability. However
one major limitation of working with off-the-shelf industrial
systems is that they may contain proprietary, “closed-box”
software that must be contended with. For example, the ABB
arm runs an additional safety layer that instantly stops the
robot when it thinks something bad will happen. It took careful
effort to work within these constraints because the robot was
operating near its limits. See Appendix C for details.
For the ABB arms, either an ABB IRB 120T or ABB IRB
1100-4/0.58 are used, the latter being a faster version with a
different joint structure. Both are capable of fast (joints rotate
up to 420 or 600 degrees/s), repeatable (to within 0.01mm)
motions and allow a high control frequency. The arm’s end
effector is an 18.8cm 3D-printed extension attached to a
standard table tennis paddle that has had its handle removed
(Figure 1 right). While the ABB arms are not perfect analogs
to human arms, they can impart significant force and spin on
the ball.
Taking inspiration from professional table tennis where play
can extend well to the side of and away from the table,
the Festo gantries range in size from 2 × 2m to 4 × 2m,
despite the table tennis table being 1.525m wide. This extra
range gives the robot more options for returning the ball. The
gantries can move up to 2 m/s in in both axes. Most other
robotic table tennis systems (discussed in Section IV-B) opt
for a fixed-position arm but the inclusion of a gantry means
the robot is able to reach more of the table space and has
more freedom to adopt general policies. The downside is that
the gantry complicates the system by adding two degrees
of freedom leading to an overdetermined system whilst also
imparting additional lateral forces on the robot arm that must
be accounted for.
B. Communication, Safety, and Control
The ABB robot accepts position and velocity target com-
mands and provides joint feedback at 248Hz via the Externally
Guided Motion (EGM) [1] interface. The Festo gantry is
controlled through a Modbus [90] interface at approximately
125Hz. See Appendix C for full communication details.
Safety is a critical component of controlling robots. While
the robot should be hitting the ball, collision with anything else
in the environment should be avoided. To solve this problem,
commands are filtered through a safety simulator before being
sent to the robot (a simplified version of Section II-C). The
simulator converts a velocity action generated by the control
policy to a position and velocity command required by EGM at
each timestep. Collisions in the simulator generate a repulsive
force that pushes the robot away, resulting in a valid, safe
command for the real robot. Objects in the safety simulator are
dilated for an adequate safety margin and additional obstacles
are added to block off the “danger zones” robot should avoid.
Low-level robot control can be extremely time-sensitive and
is typically implemented in a lower-level language like C++
for performance. Python on the other hand is very useful
for high-level machine learning implementations and rapid
iteration but is not well suited to high speed robot control due
to the Global Interpreter Lock (GIL) which severely hampers
concurrency. This limitation can be mitigated through multiple
Python processes, but is still not optimal for speed. Therefore
this system adopts a hybrid approach where latency sensitive
processes like control and perception are implemented in C++
while others are partitioned into several Python binaries (Fig-
ure 2). Having these components in Python allows researchers
to iterate rapidly and not worry as much about low-level
details. This separation also allows components to be easily
swapped or tested.
C. Simulator
The table tennis environment is simulated to facilitate sim-
to-real training and prototyping for real robot training. PyBul-
let [19] is the physics engine and the environment interface
conforms to the Gym API [12].
Figure 2 (left) gives an overview of the environment struc-
ture in simulation and compares it with the real world environ-
ment (see Section II-E). There are five conceptual components;
(1) the physics simulation and ball dynamics model which
together model the dynamics of the robot and ball, (2) the
StateMachine which uses ball contact information from
the physics simulation and tracks the semantic state of the
game (e.g. the ball just bounced on the opponent’s side of the
table, the player hit the ball), (3) the RewardManager which
loads a configurable set of rewards and outputs the reward per
step, (4) the DoneManager which loads a configurable set of
done conditions (e.g. ball leaves play area, robot collision with
non-ball object) and outputs if the episode is done per step,
and (5) the Observation class which configurably formats
the environment observation per step.
The main advantage of this design is that it isolates compo-
nents so they are easy to build and iterate on. For example, the
StateMachine makes it easy to extend the environment to
more complex tasks. New tasks are defined by implementing a
new state machine in a config file. The StateMachine also
makes it easier to determine the episode termination condition
and some rewards (e.g. for hitting the ball). Note that whilst
related, it is not the same as the transition function of the
MDP; the StateMachine is less granular and changes at a
lower frequency. Another example is the RewardManager.
It is common practice in robot learning when training using
the reinforcement learning paradigm to experiment frequently
with the reward function. To facilitate this, reward components
and their weights are specified in a config file taken in
by the RewardManager, which calculates and sums each
component. This makes it straightforward to change rewards
and easy to define new components.
1) Latency modeling: Latency is a major source of the sim-
to-real gap in robotics [91]. To mitigate this issue, and inspired
by Tan et al. [91], latency is modelled in the simulation as
follows. During inference, the history of observations and
corresponding timestamps are stored and linearly interpolated
to produce an observation with a desired latency. In contrast to
[91] which uses a single latency range sampled uniformly for
the whole observation, the latency of five main components —
Ball observation (i.e. latency of the ball perception system),
ABB observation, Festo observation, ABB action, Festo action
Latencies (ms)
Component µ σ
Ball observation 40 8.2
ABB observation 29 8.2
Festo observation 33 9.0
ABB action 71 5.7
Festo action 64.5 11.5
TABLE I: Latency distribution values.

— are modeled as a Gaussian distribution and a distinct dis-
tribution is used for each component. The mean and standard
deviation per component were measured empirically on the
physical system through instrumentation that logs timestamps
throughout the software stack (see Table I). In simulation, at
the beginning of each episode a latency value is sampled per
component and the observation components are interpolated
to those latency values per step. Similarly, action latency is
implemented by storing the raw actions produced by the policy
in a buffer, and linearly interpolating the action sent to the
robot to the desired latency.
2) Ball distributions, observation noise, and domain ran-
domization: A table tennis player must be able to return
balls with many different incoming trajectories and angular
velocities. That is, they experience different ball distributions.
Ball dynamics and distributions are implemented following
[2]. Each episode, initial ball conditions are sampled from a
parameterized distribution which is specified in a config. To
account for real world jitter, random noise is added to the
ball observation. Domain randomization [77, 15, 41, 75] is
also supported for many physical parameters. The paddle and
table restitution coefficients are randomized by default.
For more details on the simulator see Appendix D.
D. Perception System
Table tennis is a highly dynamic sport (an amateur-speed
ball crosses the table in 0.4 seconds), requiring extremely
fast reaction times and precise motor control when hitting the
ball. Therefore a vision system with the desiderata of low
latency and high precision is required. It is also not possible
to instrument (e.g. with LEDs) or paint the ball for active
tracking as they are very sensitive to variation in weight or
texture and so a passive vision system must be employed.
A custom vision pipeline that is fast, accurate and passive
is designed to provide 3D balls positions. It consists of three
main components 1) 2D ball detection across two stereo
cameras, 2) triangulation to recover the 3D ball position
and 3) a sequential decision making process which manages
trajectory creation, filtering, and termination. The remainder
of this section will provide details on the hardware and these
components.
1) Camera Hardware, Synchronization and Setup: For im-
age capture the system employs a pair of Ximea MQ013CG-
ON cameras that have a hardwired synchronization cable
and are connected to the host computer via USB3 active
optical cables. Cameras lenses are firmly locked and focused.
Synchronization timestamps are used to match images down-
stream. Many different cameras were tried, but these had high
frame rates (the cameras can run at 125FPS at a resolution of
1280x1024) and an extremely low latency of 388µs. Other
cameras were capable of higher FPS, at the cost of more
latency which is not acceptable in this high-speed domain.
To achieve the desired performance the camera uses a global
shutter with a short (4ms) exposure time and only returns the
raw, unprocessed Bayer pattern.
Fig. 3: Quantification of triangulation bias over the length
of playing area (y-position) at a height of 250mm above the
center line. The more orthogonal viewpoints offered by placing
cameras on opposite sides of the tables lead to an order of
magnitude reduction in triangulation bias.
The ball is small and moves fast, so capturing it accurately
is a challenge. Ideally the cameras would be as close to the
action as possible, but in a dual camera setup, each needs
to view the entire play area. Additionally, putting sensitively
calibrated cameras in the path of fast moving balls is not
ideal. Instead, the cameras are mounted roughly 2m above
the play area on each side of the table and are equipped
with Fujinon FE185C086HA-1 “fisheye” lenses that expand
the view to the full play area, including the gantries. While
capturing more of the environment, the fisheye lens distortion
introduces challenges in calibration and additional uncertainty
in triangulation.
The direct linear transform (DLT) method [35] for binocular
stereo vision estimates a 3D position from these image loca-
tions in the table’s coordinate frame. However, the problem of
non-uniform and non-zero mean bias known as triangulation
bias [23] must be considered in optimizing camera placement.
Two stereo camera configurations are considered, two over-
head cameras viewing the scene from: 1) the same side of the
table and 2) opposite sides. Simulation is used to quantify
triangulation bias across these configurations and decouple
triangulation from potential errors in calibration. Quantifying
this bias for common ball positions (see Figure 3) indicates
that positioning the cameras on opposite table sides results
in a significant reduction in the overall triangulation bias.
Furthermore, this configuration also benefits from a larger
baseline between the cameras for reducing estimation variance
[25].
2) Ball Detection: The core of the perception system lies
with ball detection. The system uses a temporal convolutional
architecture to process each camera’s video stream indepen-
dently and provides information about the ball location and
velocity for the downstream triangulation and filtering (see
Figure 4). The system uses raw Bayer images and tempo-
ral convolutions, which allow it to efficiently process each
video stream independently and thus improve the latency
and accuracy of ball detection. The output structure takes

Fig. 4: Ball Detection. These synchronized images (cropped
to approximately 50% normal size) show the temporal con-
volutional network detecting the ball (detected ball center in
pixels) independently from cameras on both sides of the table.
These detections are triangulated and used for 3D tracking.
inspiration from CenterNet [99, 100] by producing per location
predictions that include: a ball score indicating corresponding
to the likelihood of the ball center at that location, a 2D local
offset to accommodate sub-pixel resolution, and a 2D estimate
of the ball velocity in pixels.
a) Direct Processing of Bayer Images: The detection
network takes the raw Bayer pattern image [7] as input directly
from the high speed camera after cropping to the play area
at a resolution of 512 × 1024. By skipping Bayer to RGB
conversion, 1ms (or 15% of the time between images) of
conversion induced latency per camera is avoided and data
transferred from camera to host to accelerator is reduced
by
2
3
, further reducing latency. In contrast to other models
utilizing Bayer images [14], no loss in performance was found
using the raw format, largely due to special attention given to
structure of the 2 × 2 Bayer pattern and ensuring the first
convolution layer is also set to have a stride of 2 × 2. This
alignment means that the individual weights of the first layer
are only responsible for a single color across all positions of
the convolution operation. The immediate striding also benefits
wall-clock time by down-sampling the input to a quarter of
the original size. The alignment with the Bayer pattern is also
extended to any crop operations during training as discussed
later in this section.
b) Detector Backbone with Buffered Temporal Convolu-
tions: A custom deep-learning based ball detector is used
to learn the right combination of color, shape and motion
for identifying the ball in play. Its architecture falls in the
category of a convolutional neural network (CNN) with a
compact size of only 27k parameters spread over five spatial
convolutional layers and two temporal convolutions to capture
motion features. Compared to related architectures such as
ConvLSTM [85], this fully convolutional approach restricts
the temporal influence of the predictions to a finite temporal
window allowing for greater interpretability and fault diagno-
sis. Full details of the architecture are provided in Appendix
E.
Temporal convolutional operations are employed to capture
motion as a visual cue for detecting the ball in play and the
direction of motion. In contrast to the typical implementation
that requires a window of frames to be presented at each
timestep, the implementation in this system only requires a
single frame to be presented to the CNN for each timestep
during inference. This change minimises data transfer from
the host device to the accelerator running the CNN operations,
a critical throughput bottleneck. This temporal layer creates a
buffer to store the input feature for the next timestep as in
Khandelwal et al. [49].
c) Training the Detector Model: To train the detection
model, a dataset of 2.3M small temporal patches were selected
to match the receptive field of the architecture (64 × 64 pixels
and n frames). The patches are selected from frames with a
labeled ball position where a single positive patch is defined
as being centered on the ball position in the current frame with
the temporal dimension filled with the same spatial position
but spanning [t − n + 1, t]. Similarly a negative patch can
be selected from the same frame at a random location which
does not overlap with the positive patch. Examples of positive
and negative patches are provided in the Appendix. Special
consideration is taken to align the patch selection with the
Bayer pattern by rounding the patch location to the nearest
even number. This local patch based training has several
benefits; it 1) reduces the training time by 50×
2
, 2) helps
generalization across different parts of the image as the model
is unable to rely on global statistics of ball positions, 3) offers
a more fine-grained selection of training data for non-trivial
cases e.g. when another ball is still moving in the scene, and
similarly 4) allows for hard negative mining [89] on sequences
where it is known for no ball to exist in play.
For each patch the separate outputs each have a correspond-
ing loss. First, the ball score is optimized using the standard bi-
nary cross-entropy loss for both positive and negative patches.
For positive patches only, the local offset is optimized using
the mean-squared error loss using the relative position between
the corresponding pixel coordinate and the ball center in the
current frame. The velocity prediction is similarly optimized,
instead using the relative position of the ball in next frame to
the current frame as the regression target.
3) 3D Tracking: To have a consistent representation that is
invariant to camera viewpoint, the ball is represented in 3D
in the table’s coordinate frame. If the maximum score in both
images are above a learnt threshold, their current and next
image positions using the local offset and velocity predictions
are triangulated using DLT [35]. This corresponds to the 3D
position and 3D velocity of the ball in the table frame. Finally
these observations are provided to a recursive Kalman filter
[46] to refine the estimated ball state before its 3D position is
sent to the robot policy.
E. Running on the Real Robot
As an analog to the simulated environment (Section II-C)
there is an equivalent Gym environment for the real hardware.
This environment must contend with an additional set of
challenges that are either nonexistent or trivial in simulation:
1) continuous raw sensor observation at different frequencies
that is subjected to jitter and real world noise, 2) determining
the start of an episode, 3) monitoring environment state, 4)
environment resets.
2
Two 64 × 64 × n patches are required per frame as opposed to the full
512 × 1024 × n frames.
1) Observation generation: In the simulator, the state of
every object is known and can be queried at fixed intervals.
In contrast, the real environment receives sensor readings
from different modalities at different frequencies (e.g. the ball,
ABB, Festo) that may be inaccurate or arrive irregularly. To
generate policy observations, the sensor observations, along
with their timestamps are buffered and interpolated or extrap-
olated to the environment step timestamp. To address noise
and jitter a bandpass filter is applied to the observation buffer
before interpolation (see Appendix F). These observations
are afterwards converted according to the policy observation
specification.
2) Episode Starts: Simulators provide a direct function to
reset the environment to a start state instantly. In the real
world, the robot must be physically moved to a start state with
controllers based on standard S-curve trajectory planning at the
end of the episode or just after a paddle hit. The latter was
shown to be beneficial in [2], so that a human and robot could
interact as fast as possible. An episode starts when a valid
ball is thrown towards the robot. The real world must rely on
vision to detect this event and can be subject to spurious false
positives, balls rolling on the table, bad ball throws, etc., which
need to be taken into consideration. Therefore an episode is
started only if a ball is detected incoming toward a robot from
a predefined region of space.
3) Referee: To interface with the GymAPI a process
called Referee generates the reward, done, and info using the
StateMachine, RewardManager, and DoneManager
as defined in Section II-C. It receives raw sensor observations
at different frequencies and updates a PyBullet instance.
The observations are filtered (see Appendix F) and used to
update the PyBullet state (only the position). It calculates
different ball contact events (see Appendix D), compensates
for false positives, and uses simple heuristics and closest point
thresholds to determine high confidence ball contact detections
to generate the events used by the previously mentioned
components.
4) Automatic system reset — continuously introducing
balls: An important aspect of a real world robotic system
is environment reset. If each episode requires a lengthy reset
process or human intervention, then progress will be slow.
Human table tennis players also face this problem and so-
called “table tennis robots” are commercially available to
shoot balls continuously and even in a variety of programmed
ways. Almost all of these machines accomplish this task
with a hopper of balls that introduces a ball to two or more
rotating wheels forcing it out at a desired speed and spin (see
Figure 1 left). Unfortunately, while many of these devices are
“programmable”, none provide true APIs and instead rely on
physical interfaces. Therefore, an off-the-shelf thrower was
customized with a Pololu motor controller and an infrared
sensor for detecting throws, allowing it to be controlled over
USB. This setup allows balls to be introduced purely through
software control.
However, the ball thrower is still limited by the hopper
capacity. A system to automate the refill process was designed
that exploits the light weight of table tennis balls by blowing
air to return them to the hopper. A ceiling-mounted fan blows
down to remove balls stuck on the table, which is surrounded
by foamcore to direct the balls into carpeted pathways. At each
corner of the path is a blower fan (typically meant for drying
out carpet) that directs air across the floor. The balls circulate
around the table until they reach a ramp that directs them to a
tube that also uses air to transport them back into the hopper.
When the thrower detects it hasn’t shot a ball for a while, the
fans turn on for 40 seconds, refilling the hopper so training
or evaluation can continue indefinitely. See Appendix F for a
diagram and the video at https://youtu.be/HbortM1wpAA for
a demonstration.
One demonstration of the utility of this system is through
the experiments in this paper. For example, the simulator
parameter ablation studies (Section III-A) involved evaluat-
ing over 150 policies in 450+ independent evaluations on
a physical robot with 22.5k+ balls thrown. All evaluations
were conducted remotely and required onsite intervention just
once
3
.
F. Design of Robot Policies
Policies have been trained for this system using a variety
of approaches. This section details the basic structure of these
policies and any customization needed for specific methods.
1) Policies: The policy input consists of a history of the
past eight robot joint and ball states, and it outputs the desired
robot state, typically a velocity for each of the eight joints
(joint space policies). Many robot control frequencies ranging
from from 20Hz - 100Hz have been explored, but 100Hz is
used for most experiments. Most policies are compact, repre-
sented as a three layer, 1D, fully convolutional gated dilated
CNN with ≈1k parameters introduced in [26]. However, it is
also possible to deploy larger policies. For example, a 13m
parameter policy consisting of two LSTM layers with a fully
connected output layer has successfully controlled the robot
at 60Hz [20].
2) Robot Policies in Task Space: Joint space policies lack
the relation between joint movement and the task at hand. A
more compact task space — the pose of the robot end effector
— is especially beneficial in in robotics, showing significant
improvements in learning of locomotion and manipulation
tasks [21, 60, 95, 57].
Standard task space control uses the Jacobian Matrix to
calculate joint torques or velocities given target pose, target
end effector velocities, joint angles and joint velocities. This
system employs a reduced (pitch invariant) version with 5
dimensions. Instead of commanding the full pose of the end
effector, it commands the position in 3 dimensions and the
surface normal of the paddle in 2 dimensions (roll and yaw). In
contrast to the default joint space policies, which use velocity
control, task space policies are position controlled, which have
the added benefit of easily defining a bounding cube that the
paddle should operate in. The robot state component of the
3
Some tape became unstuck and the balls escaped.

observation space is also represented in task space, making
policies independent of a robot’s form factor and enabling
transfer of learned policies across different robots (see Section
III-D).
G. Blackbox Gradient Sensing (BGS)
The design of the system allows for interaction with many
different learning approaches, as long as they conform to
the given APIs. The system supports training using a variety
of methods including BGS [2] (evolutionary strategies), PPO
[83] and SAC [33] (reinforcement learning), and GoalsEye
(behavior cloning). The rest of the section describes BGS,
since it is used as the training algorithm in all the system
studies in this paper (see Section III).
BGS is an ES algorithm. This class of algorithm maximize
a smoothed version of expected episode return, R, given by:
R
σ
(θ) = E
δ ∼ N (0,I
d
)
[R(θ + σδ)] (1)
where σ > 0 controls the precision of the smoothing, and δ is a
random normal perturbation vector with the same dimension as
the policy parameters θ. θ is perturbed by adding or subtracting
N Gaussian perturbations δ
R
i
and calculating episode return,
R
+
i
and R
−
i
for each direction. Assuming the perturbations,
δ
R
i
, are rank ordered with δ
R
1
being the top performing
direction, then the policy update can be expressed as:
θ
′
= θ + α
1
σ
R
k
X
i=1
"
1
m
m
X
j=1
R
+
i,j
−
1
m
m
X
j=1
R
−
i,j
δ
R
i
#
(2)
where α is the step size, σ
R
is the standard deviation of
each distinct reward (positive and negative direction), N is
the number of directions sampled per parameter update, and
k(< N) is the number of top directions (elites). m is the
number of repeats per direction to reduce variance for reward
estimation. R
+
i,j
is the reward corresponding to the j-th repeat
of i-th in the positive direction. R
−
i,j
is the same but in the
negative direction.
BGS is an improvement upon a popular ES algorithm
ARS [59], with two major changes.
1) Reward differential elite-choice.: In ARS, rewards are
ranked yielding an ordering of directions based on the absolute
rewards of either the positive or negative directions. BGS
takes the absolute difference in rewards between the positive
and negative directions and rank the differences to yield an
ordering over directions. ARS can be interpreted as ranking
directions in absolute reward space, whereas BGS ranks di-
rections according to reward curvature:
ARS: Sort δ
R
i
by max{R
+
i
, R
−
i
}. (3)
BGS: Sort δ
R
i
by |R
+
i
− R
−
i
|. (4)
2) Orthogonal sampling: Orthogonal ensembles of per-
turbations δ
R
i
[18] relies on constructing perturbations δ
R
i
in blocks, where each block consists of pairwise orthogonal
samples. Those samples are still of Gaussian marginal distri-
butions, matching those of the regular non-orthogonal variant.
The feasibility of such a construction comes from the isotropic
property of the Gaussian distribution (see: [18] for details).
BGS policies are trained in simulation and transferred zero-
shot to the physical hardware. An important note is that
the BGS framework can also fine tune policies on hardware
through the real Gym API (Section II-E). Hyperparameters
must be adjusted in this case to account for there only being
one “worker” to gather samples.
III. SYSTEM STUDIES
This section describes several experiments that explore and
evaluate the importance of the various components of the
system.
Except where noted, the experiments use a ball return task
for training and testing. A ball is launched towards the robot
such that it bounces on the robot’s side of the table (a standard
rule in table tennis). The robot must then hit the ball back over
the net so it lands on the opposite side of the table. Although
other work has applied this system to more complex tasks
(e.g. cooperative human rallies [2]), a simpler task isolates
the variables we are interested in from complications like
variability and repeatability of humans.
For real robot evaluations, making contact with the ball is
worth one point and landing on the opposing side is worth
another point, for a maximum episode return of 2.0. A single
evaluation is the average return over 50 episodes. Simulated
training runs typically have additional reward shaping applied
that change the maximum episode return to 4.0 (see Appendix
D).
A. Effect of Simulation Parameters on Zero-Shot Transfer
Our goal in this section is to assess the sensitivity of policy
performance to environment parameters. We focus on the zero-
shot sim-to-real performance of trained policies and hope that
this analysis (presented in Figure 5) sheds some light on which
aspects of similar systems need to be faithfully aligned with
the real world and where error can be tolerated. For the effects
on training quality see Appendix H.
1) Evaluation methodology: For each test in this section,
10 models were trained in simulation using BGS described
in Section II-G for 10,000 training iterations (equivalent to
60m environment episodes, or roughly 6B environment steps).
In order to assess how different simulated training settings
affect transfer independent of how they affect training quality,
we only evaluate models that trained well in simulation (i.e.,
achieved more than 97.5% of the maximum possible return).
The resulting set of policies were evaluated on the real setup
for 3 × 50 episodes.
2) Modeling latency is crucial for good performance:
The latency study presented in Figure 5 (top left) show that
policies are sensitive to latency. The baseline model (i.e. the
model that uses latency values as measured on hardware) had
a significantly higher zero-shot transfer than any of the other
latency values tested. The next best model had 50% of the
baseline latency, achieving an average zero-shot transfer of
1.33 compared with 1.83 for the baseline. Zero-shot transfer

Fig. 5: Effect of simulator parameters on zero-shot sim-to-
real transfer. Policies are sensitive to latency and physical
parameter values, yet surprisingly robust to ball observation
noise and changes in the ball distribution. Charts show the
mean (with 95% CIs) zero-shot sim-to-real transfer. 2.0 is a
perfect score with a policy returning all balls. R = restitution
coefficient.
scores for the other latency levels tested (0%, 20% and 150%)
had very poor performance. Interestingly, some policies are
lucky and transfer relatively well — for example one policy
with 0% latency had an average score of 1.54. However,
performance is highly inconsistent when simulated latency is
different from measured parameters.
3) Anchoring ball distributions to the real world matters,
but precision is not essential: The ball distribution study
shown in Figure 5 (top right) indicate that policies are robust to
variations in ball distributions provided the real world distribu-
tion (thrower) is contained within the training distribution. The
medium and wide distributions were derived from the baseline
distribution but are 25% and 100% larger respectively (see
Appendix H). The distribution derived from a different ball
thrower (thrower 2) is also larger than the baseline thrower
distribution but effectively contains it. In contrast, very small
training distributions (tiny) or distributions which are disjoint
from the baseline distribution in one or more components
(velocity offset — disjoint in y velocity) result in performance
degradation.
4) Policies are robust to observation noise provided it
has zero mean: The observation noise study in Figure 5
(bottom left) revealed that policies have a high tolerance for
zero-mean observation noise. Doubling the noise to +/- 8cm
(4 ball diameters in total) or removing it altogether had a
minor impact on performance. However, if noise is biased
Fig. 6: Perception resilience studies. Reducing FPS and in-
creasing latency have threshold points where performance of
the system is stable until they reach a point where the robot can
no longer react the to ball in them. Additional noise causes
graceful degradation in performance, increased by non-zero
mean distributions (common in vision triangulation).
performance suffers substantially. Adding a 4cm (one ball
diameter) bias to the default noise results in a 36% drop in
reward (approximately 80% drop in return rate).
5) Policies are sensitive to physical parameters, which can
have complex interactions with each other: The physical
parameter ablations in Figure 5 (bottom right) reveal how
sensitive policies are to all parameter values tested. Removing
randomization from the table restitution coefficient (table: no
R randomize) degrades performance by 14%. Increasing the
ball restitution coefficient by just 2% reduces performance by
25%, whilst increasing the table restitution coefficient by 8%
reduces performance by 36%.
This study also highlights a current limitation of the system.
Setting key parameters in the simulator such as the table and
paddle restitution coefficients, or the paddle mass to values
estimated following the process described in Appendix D led
to worse performance than tuned values (see measured v.s.
tuned and also Appendix H for all parameter values). We
hypothesize this is because ball spin is not correctly modelled
in the simulator and that the tuned values compensate for this
for the particular ball distributions used in the real world.
One challenge of a complex system with many interacting
components is that multiple errors can compensate for each
other, making them difficult to notice if performance does
not suffer dramatically. It was only through conducting these
studies that we became aware of the drop in performance from
using measured values. In future work we plan to model spin

and investigate if this resolves the performance degradation
from using measured values. For further discussion on this
topic, see Appendix I.
B. Perception Resilience Studies
In this section we explore important factors in the perception
system and how they affect end-to-end performance of the
entire system. Latency and accuracy are two major factors and
typically there is a tradeoff between them. A more accurate
model may take longer to process but for fast moving objects
(like a table tennis ball) it may be better to have a less accurate
result more quickly. Framerate also plays a role. If processing
takes longer than frames are arriving, latency will increase
over time and eventually require dropping frames to catch up.
For these experiments we select three high performing
models from the baseline simulator parameter studies and test
them on the real robot while modulating vision performance in
the following ways: (1) reduce the framerate of the cameras
, (2) increase latency by queuing observations and sending
them to the policy at fixed intervals, and (3) reduce accuracy
by injecting zero mean and non-zero mean noise to the ball
position (over and above inherent noise in the system).
The results from these experiments can be seen in Figure 6.
For both framerate and latency, the performance stays con-
sistent with the baseline until there is a heavy dropoff at 50
FPS and 150ms respectively, at which point the robot likely
no longer has sufficient time to react to the ball and swings
too late, almost universally resulting in balls that hit the net
instead of going over. There is a gentle decline in performance
as noise increases, but the impact is much greater for non-zero
mean noise: going from zero mean ([-4, 4] cm) noise to non-
zero mean ([-1, 7] cm) is equivalent to doubling the zero mean
noise ([-8, 8] cm). The interpolation of observations described
in Section II-E likely serves as a buffer against low levels of
zero mean noise. Qualitatively, the robot’s behavior was jittery
and unstable when moderate noise was introduced. Overall,
the stable performance over moderate framerate and latency
declines implies that designing around accuracy would be ideal
for this task, although as trajectories become more varied and
nuanced higher framerates may be necessary to capture their
detailed behavior.
C. ES Training Studies
BGS has been a consistent and reliable method for learning
table tennis tasks on this system in simulation and fine-
tuning in the real world. In this section we ablate the main
components of BGS and compare it with a closely related
method, ARS.
Figure 7 (top) presents a comparison of BGS and ARS on
the default ball return task against a narrow ball distribution.
For both methods we set number of perturbations to 200,
σ to 0.025, and the proportion of perturbations selected as
elites to 30%. We roll out each perturbation for 15 episodes
and average the reward to reduce reward variance due to
stochasticity in the environment. We also apply the common
0 2000 4000 6000 8000 10000
ES Iterations
2
3
4
Reward
ARS
BGS
0 2000 4000 6000 8000 10000 12000
ES Iterations
0.0
0.5
1.0
Reward
ARS (step 1e-4)
ARS (step 1e-3)
ARS (step 4e-3)
ARS (step 1e-2)
ARS (step 1e-1)
0 2000 4000 6000 8000 10000 12000
ES Iterations
0.0
0.5
1.0
Reward
ARS
ARS-ortho
ARS-diff
BGS
Fig. 7: BGS ablation studies. (top) BGS and ARS perform
comparably on the ball return task with a narrow ball dis-
tribution. (bottom) A harder environment, ball targeting with
a larger ball distribution. (left) Step-size alpha has a very
significant effect on training success. (right) Improvements
with reward differential elite-choice technique, orthogonal
perturbation sampling and their combination (BGS).
approach of state normalization [82, 71]. Under these settings,
the methods are comparable.
Next we consider a harder ball targeting task where the
objective for the policy is to return the ball to a precise
(randomized per episode) location on the opponent’s side of
the table [20]. We further increase the difficulty by increasing
the range of incoming balls, i.e. using a wider ball distribution,
and by decreasing the number of perturbations to 50. Tuning
the step size α was crucial for successful policy training with
ARS (Figure 7 bottom left). An un-tuned step-size may lead
to extremely slow training or fast training with sub-optimal
asymptotic performance.
Figure 7 (bottom right) shows the enhancements in training
made by the BGS techniques independently and collectively
compared to baseline ARS. Reward differential elite-choice
and orthogonal sampling leads to faster convergence. As a
result, BGS is the default ES algorithm for policy training.
D. Acting and Observing in Task Space
The previous results use joint space for observations and
actions. In this section we explore policies that operate in “task
space” (see Section II-F2). Task space has several benefits:
it is compact, interpretable, provides a bounding cube for
the end effector as a safety mechanism, and aligns the robot
action and the observation spaces with ball observations. In
our experiments we show that task spaces policies train faster
and, more importantly, can be transferred to different robot
morphologies.
Figure 8 (top left) compares training speed between joint
space (JS), task space for actions — TS(Act), and full task
space policies (actions and observations) — TS(Act&Obs).
Both task spaces policies train faster than JS policies. We also

Fig. 8: Training policies in task space in the baseline environ-
ment (top-left) and a harder damped environment (top-right).
Training converges faster in task-space for both scenarios.
(bottom) A task space policy trained in the damped environ-
ment is successfully transferred to different morphologies and
a new robot.
assess task space policies on a harder (damped) environment
4
.
Now the robot needs to learn to swing and hit the ball harder.
Figure 8 (top right) shows that task space policies learn to
solve the task (albeit not perfectly) while joint space policies
gets stuck in a local maxima. For transfer performance of these
policies see Appendix K.
One crucial benefit of operating in task space is the robust-
ness to different robots or morphologies. To demonstrate this,
we first take the TS(Act&Obs) model trained in the damped
environment and transfer it to the real robot (Figure 8 bottom).
Performance is almost perfect with a score of 1.9. Next we
change the initial pose of the robot and freeze two of the arm
joints. Policy performance is maintained under a pose change
(ABB 120T & Modified Default Pose (MDP)) and only drops
slightly when some joints are also frozen (ABB 120T & MDP
+ 2 Frozen Joints). We then evaluate the policy on a robot
with a different morphology and ball distribution and see that
performance drops substantially. However, a task space policy
is easily adaptable to new settings without retraining by adding
a residual to actions to shift the paddle position. This is not
possible when operating in joint space. Observing the robot
showed that it was swinging too low and slightly off-angle and
so adding a residual of 7cm above the table and 0.2 radians
of roll causes the original policy performance to be nearly
recovered (ABB 1100-4 & New Ball Dist & Manual Offset).
E. Applying to a New Task: Catching
While the system described above was designed for table
tennis, it is general enough to be applied to other agile tasks.
In this section, we apply it to a new task of catching a thrown
ball and assess the effect of latency modelling, similar to the
latency experiment from Section III-A.
4
Created by lowering the restitution coefficient of the paddle and ball, and
increasing the linear damping of the ball.
We used a similar system setup with minor modifications:
a single horizontal linear rail (instead of two) and a lacrosse
head as the end effector. The software stack and agents are
similar with small differences: simplified RewardManager
and DoneManager, soft body modelling of the net in sim-
ulation, trajectory prediction inputs for agents, and handling
occlusions when the ball is close to the net. The BGS agents
are similarly trained in a simulator before being transferred to
the real hardware, where they are fine-tuned. Agents achieve
a final catching success rate of 85 ∼ 90%. For full details on
the task see related work [84].
This task has a much larger variance in sim-to-real transfer
due to difficulty in accurately modelling net & ball capture
dynamics. As in the table tennis study, agents were trained in
simulation with latencies of 100%, 0%, 20%, 50%, and 150%
of baseline latency. Experiments with lower latency (0%, 20%,
and 50%) all transferred poorly, between 0 ∼ 10% catch
rate. Curiously, baseline latency and 150% latency performed
similarly, with one 150% run achieving the best zero-shot
transfer ever: a score equaling policies fine-tuned on the real
robot. This finding contradicts the results in the table tennis
task, which prompted further investigation and revealed that
the latency for this task was set incorrectly in the configuration
file; the real value was much closer to the 150% value.
This revelation dovetails with the 50% latency table tennis
results: a close latency can still give decent performance,
but accurate values are better. As such, it may be useful
to generally run ablation studies such as these to challenge
assumptions about the system and potentially find bugs.
IV. RELATED WORK
A. Agile Robotic Learning
The space of agile robotic learning systems is varied. It
includes autonomous vehicles such as cars [76, 79, 70, 9, 10],
legged locomotion [73, 91, 32, 78, 86, 87, 4], as well as
dynamic throwing [3, 52, 29, 98], catching [84], and hitting
— which is where table tennis fits.
Many of these systems face similar challenges — envi-
ronment resets, latency, safety, sim-to-real, perception, and
system running speed as exemplified in strict inference and
environment step time requirements.
The benefits of automatic resets have been demonstrated
in quadrupedal systems [86, 87] and throwing [98]. To our
knowledge, this system is the first table tennis learning system
with automatic resets, enabling autonomous training and eval-
uation in the real world for hours without human intervention.
Latency is a well known problem in physical learning
systems [91]. The system contributes to this area by extend-
ing [91], modeling multiple latencies in simulation, and by
validating its importance through extensive experiments. Or-
thogonally, the system also includes observation interpolation
on the physical system as a useful technique for increasing the
robustness of deployed policies to latency variation (e.g. from
jitter). We demonstrated empirically the robustness of policies
to substantial injections of latency and hypothesize that the
observation interpolation plays a crucial role in this.
Safety is another crucial element that becomes very im-
portant with fast moving robots. Trajectory planners [54] can
avoid static obstacles, neural networks can check for collisions
[48], safe RL can be used to restrict state spaces [97], or
a system can learn from safe demonstrations [67, 68, 40].
In contrast, this system runs a parallel simulation during
deployment as a safety layer. Doing so is beneficial because
the robot policy runs at a high frequency and there are several
physical environments and robots and it enables (1) definition
of undesirable states and (2) preventing a physical robot from
reaching them. To the best of our knowledge this is also a
novel component of the system.
Learning controllers from scratch in the real world can be
challenging for an agile robot due to sample inefficiency and
dangers in policy exploration. Training first in a simulator and
then deploying to the real robot [56, 75, 91] (i.e. sim-to-
real) is an effective way to mitigate both issues, but persistent
differences between simulated and real world environments
can be difficult to overcome [42, 72].
Perception is crucial in helping robots adapt to changes
in the environment [4, 96] and interact with relevant objects
[98, 52]. When objects need to be tracked at high speed such
as in catching or hitting, it is typical to utilize methods such
as motion-capture systems [65] however for table tennis, the
ball needs to adhere to strict standards that prevent instru-
mentation or altering of the ball properties. Passive vision
approaches for detecting the location within a video frame
of a bright colored ball from a stationary camera may seem
trivial, however, applying image processing techniques [92]
such as color thresholding, shape fitting [37], and background
subtraction are problematic. When considering the typical
video captured from the cameras several factors in the scene
render such approaches brittle. For example, the color of
the natural light changes through out the day. Even under
fixed lighting, the video stream is captured at 125Hz which
is above the Nyquist frequency of the electricity powering
fluorescent lights, resulting in images that flicker between
frames. Additionally, there are typically several leftover balls
from previous episodes around the scene which share the same
color and shape as the ball in play. These distractors make
data association more of a challenge for down stream tracking.
Finally, extracting things that move is also a challenge when
other basic visual cues are unreliable because there is always
a robot and or a human moving in the scene. The perception
component of the system in this paper uniquely combined all
these visual cues by learning to detect the ball in an end-to-
end fashion that is robust to visual ambiguities and provides
both precise ball locations and velocity estimates.
Finally, prior work in robot learning varies by how much
it focuses on the system compared with the problem being
tackled. [22, 45, 47, 87, 66, 92, 56] are examples of works
which dedicate substantial attention to the system. They pro-
vide valuable details and know-how about what mattered for
a system to work in practice. This work is spiritually similar.
B. Robotic Table Tennis
Robotic table tennis is a challenging, dynamic task [13]
that has been a test bed for robotics research since the
1980s [8, 51, 34, 36, 66]. The current exemplar is the Omron
robot [55]. Until recently, most methods tackled the problem
by identifying a virtual hitting point for the racket [63, 64,
6, 69, 101, 39, 88, 58]. These methods depend on being
able to predict the ball state at time t either from a ball
dynamics model which may be parameterized [63, 64, 61, 62]
or by learning to predict it [66, 69, 101]. Various methods
can then generate robot joint trajectories given these target
states [66, 63, 64, 61, 62, 67, 68, 40, 53, 92, 27]. More
recently, Tebbe et al. [93] learned to predict the paddle target
using reinforcement learning (RL).
Such approaches can be limited by their ability to predict
and generate trajectories. An alternative line of research seeks
to do away with hitting points and ball prediction models,
instead focusing on high frequency control of a robot’s joints
using either RL [13, 101, 26] or learning from demonstra-
tions [68, 17, 16]. Of these, B
¨
uchler et al. [13] is the most
similar to the system in this paper. Similar to B
¨
uchler et al.
[13], this system trains RL policies to control robot joints at
high frequencies given ball and robot states as policy inputs.
However B
¨
uchler et al. [13] uses hybrid sim and real training
as well as a robot arm driven by pneumatic artificial muscles
(PAMs), whilst this system uses a motor-driven arm. Motor-
driven arms are a common choice and used by [17, 92, 93, 67].
V. TAKEAWAYS AND LESSONS LEARNED
Here we summarize lessons learned from the system that
we hope are widely applicable to high-speed learning robotic
systems beyond table tennis.
Choosing the right robots is important. The system started
with a scaled down version of the current setup as a proof of
concept and then graduated to full-scale, industrial robots (Ap-
pendix B). Industrial robots have many benefits such as low
latency and high repeatability, but they can come with “closed-
box” issues that must be worked through (Section II-B).
A safety simulator is a dynamic and customizable solution
to constraining operations with high frequency control com-
pared to high-level trajectory planners (Section II-B).
A configurable, modular, and multi-language (e.g. C++ and
Python) system improves research and development velocity
by making experimentation and testing easy for the researcher
(Section II-B).
Latency modeling is critical for real world transfer per-
formance as indicated by our experimental results. Other
environmental factors may have varying effects that change
based on the task (Section III-A). For example, ball spin is not
accurately modeled in the ball return task, but can be critical
when more nuanced actions are required.
Accurate environmental perception is also a key factor in
transfer performance. In this system’s case many factors were
non-obvious to non-vision experts: camera placement, special
calibration techniques, lens locks, etc. all resulted in better
detection (Section II-D).
GPU data buffering, raw Bayer pattern detection, and patch
based training substantially increase the performance of high
frequency perception (Section II-D). Rather than using an off-
the-shelf perception module, a purpose-built version allows
levels of customization that may be required for high-speed
tasks.
Interpolating and smoothing inputs (Section II-E) solves the
problem of different devices running at different frequencies.
It also guards against zero-mean noise and system latency
variability, but is less effective against other types of noise.
Automatic resets and remote control increase system uti-
lization and research velocity (Section II-E). The system orig-
inally required a human to manually collect balls and control
the thrower. Now that the system can be run remotely and
“indefinitely”, significantly more data collection and training
can occur.
ES algorithms like BGS (Section II-G) are a good starting
point to explore the capabilities of a system, but they may
also be a good option in general. BGS is still the most
successful and reliable method applied in this system. Despite
poor sample efficiency, ES methods are simple to implement,
scalable, and robust optimizers that can even fine-tune real
world performance.
Humans are highly variable and don’t always follow instruc-
tions (on purpose or not) and require significant accommoda-
tions to address these issues and also to alleviate frustrations
(e.g. time to reset) and ensure valuable human time is not
wasted.
A. Limitations and Future Work
A guiding principal of the system has been not to solve
everything at once. Starting with a simple task (e.g. hitting the
ball) and then scaling up to more complex tasks (e.g. playing
with a human) provides a path to progress naturally prioritizes
inefficiencies to be addressed. For example, a long but clean
environment reset was sufficient for learning ball return tasks,
but needed optimization to be sufficiently responsive to a
human.
The current system struggles with a few key features. More
complex play requires understanding the spin of the ball and
the system currently has no way to directly read spin and it is
not even included in simulation training. While it is possible
to determine spin optically (i.e. by tracking the motion of the
logo on the ball), it would require significantly higher frame
rates and resolutions than what is currently employed. Other
approaches more suited to our setup include analyzing the
trajectory of the ball (which the robot may be doing implicitly)
or including the paddle/thrower pose into the observation;
analogous to how many humans detect spin. Additionally
learning a model of the opponent if the opponent attempts
to be deliberately deceptive, concealing of adding confusion
to their hits.
The robot’s range of motion is significant thanks to the
inclusion of the gantry, but is still limited in a few key ways.
Firstly, the safety simulator does not allow the paddle to
go below the height of the table, preventing the robot from
“scooping” low balls. This restriction prevents the robot from
catching the arm between the table and gantry, which the safety
sim was unable to prevent in testing. The robot is limited in
side-to-side motion as well as how far forward over the table
it can reach, so there may be balls that it physically cannot
return. Finally, so far the robot has not made significant use
of motion away from the table. We hope that training on more
complex ball distributions will require the robot to make full
use of the play space as professional humans do.
The sensitivity of policies also increases as the task becomes
more complex. For example, slight jitter or latency in inference
may be imperceptible for simple ball return tasks, but more
complex tasks that require higher precision quickly revealed
these gaps requiring performance optimizations. Sim-to-real
gaps are also an issue; hitting a ball can be done without
taking spin into account, but controlling spin is essential
for high-level rallying. Environmental parameters and ball
spin both become more important and incorporating domain
randomization is a promising path forward to integrating them
in a robust manner. Additionally, when human opponents come
into play, modeling them directly or indirectly make it possible
for the robot to move beyond purely reactive play and to start
incorporating strategic planning into the game.
VI. CONCLUSION
In this paper we have explored the components of a suc-
cessful, real-world robotic table tennis system. We discussed
the building blocks, trade-offs, and other design decisions that
went into the system and justify them with several case studies.
While we do not believe the system in this paper is the perfect
solution to building a learning, high-speed robotic system, we
hope that this deep-dive can serve as a reference to those who
face similar problems and as a discussion point to those who
have found alternative approaches.
ACKNOWLEDGMENTS
We would like to thank Arnab Bose, Laura Downs, and
Morgan Worthington for their work on improving the vision
calibration system and Barry Benight for their help with
video storage and encoding. We would also like to thank Yi-
Hua Edward Yang and Khem Holden for improvements to
the ball thrower control stack. We also are very grateful to
Chris Harris and Razvan Surdulescu for their overall guidance
and supervision of supporting teams such as logging and
visualization. Additional thanks go to Tomas Jackson for video
and photography and Andy Zeng for a thorough review of the
inital draft of this paper. And finally we want to thank Huong
Phan who was the lab manager for the early stages of the
project and got the project headed in the right direction.
REFERENCES
[1] ABB. Application manual Externally Guided Motion.
Thorlabs, 2022.
[2] Saminda Abeyruwan, Laura Graesser, David B
D’Ambrosio, Avi Singh, Anish Shankar, Alex Bewley,
Deepali Jain, Krzysztof Choromanski, and Pannag R
Sanketi. i-Sim2Real: Reinforcement learning of
robotic policies in tight human-robot interaction loops.
Conference on Robot Learning (CoRL), 2022.
[3] E.W. Aboaf, C.G. Atkeson, and D.J. Reinkensmeyer.
Task-level robot learning. In Proceedings. 1988 IEEE
International Conference on Robotics and Automation,
pages 1309–1310 vol.2, 1988. doi: 10.1109/ROBOT.
1988.12245.
[4] Ananye Agarwal, Ashish Kumar, Jitendra Malik, and
Deepak Pathak. Legged locomotion in challeng-
ing terrains using egocentric vision. arXiv preprint
arXiv:2211.07638, 2022.
[5] A. C. Aitken. Numerical Methods of Curve Fitting.
Proceedings of the Edinburgh Mathematical Society, 12
(4):218–218, 1961. doi: 10.1017/S0013091500025487.
[6] Russell Anderson. A Robot Ping-Pong Player: Exper-
iments in Real-Time Intelligent Control. MIT Press,
1988.
[7] Bryce E Bayer. Color imaging array, July 20 1976. US
Patent 3,971,065.
[8] John Billingsley. Robot ping pong. Practical Comput-
ing, 1983.
[9] Mariusz Bojarski, Davide Del Testa, Daniel
Dworakowski, Bernhard Firner, Beat Flepp, Prasoon
Goyal, Lawrence D Jackel, Mathew Monfort, Urs
Muller, Jiakai Zhang, et al. End to end learning for
self-driving cars. arXiv preprint arXiv:1604.07316,
2016.
[10] Mariusz Bojarski, Philip Yeres, Anna Choromanska,
Krzysztof Choromanski, Bernhard Firner, Lawrence
Jackel, and Urs Muller. Explaining how a deep neural
network trained with end-to-end learning steers a car.
arXiv preprint arXiv:1704.07911, 2017.
[11] G. Bradski. The OpenCV Library. Dr. Dobb’s Journal
of Software Tools, 2000.
[12] Greg Brockman, Vicki Cheung, Ludwig Pettersson,
Jonas Schneider, John Schulman, Jie Tang, and Wo-
jciech Zaremba. Openai gym. arXiv preprint
arXiv:1606.01540, 2016.
[13] Dieter B
¨
uchler, Simon Guist, Roberto Calandra, Vincent
Berenz, Bernhard Sch
¨
olkopf, and Jan Peters. Learning
to Play Table Tennis From Scratch using Muscular
Robots. CoRR, abs/2006.05935, 2020.
[14] Mahesh Chandra and Brejesh Lall. A Novel Method
for CNN Training Using Existing Color Datasets for
Classifying Hand Postures in Bayer Images. SN
Computer Science, 2, 04 2021. doi: 10.1007/
s42979-021-00450-w.
[15] Yevgen Chebotar, Ankur Handa, Viktor Makoviychuk,
Miles Macklin, Jan Issac, Nathan D. Ratliff, and Dieter
Fox. Closing the Sim-to-Real Loop: Adapting Simu-
lation Randomization with Real World Experience. In
International Conference on Robotics and Automation,
ICRA 2019, Montreal, QC, Canada, May 20-24, 2019,
pages 8973–8979. IEEE, 2019.
[16] Letian Chen, Rohan R. Paleja, Muyleng Ghuy, and
Matthew C. Gombolay. Joint Goal and Strategy Infer-
ence across Heterogeneous Demonstrators via Reward
Network Distillation. CoRR, abs/2001.00503, 2020.
[17] Letian Chen, Rohan R. Paleja, and Matthew C. Gom-
bolay. Learning from Suboptimal Demonstration via
Self-Supervised Reward Regression. CoRL, 2020.
[18] Krzysztof Choromanski, Mark Rowland, Vikas Sind-
hwani, Richard E. Turner, and Adrian Weller. Struc-
tured Evolution with Compact Architectures for Scal-
able Policy Optimization. In Proceedings of the 35th
International Conference on Machine Learning, pages
969–977. PMLR, 2018.
[19] Erwin Coumans and Yunfei Bai. PyBullet, a Python
module for physics simulation for games, robotics and
machine learning. http://pybullet.org, 2016–2021.
[20] Tianli Ding, Laura Graesser, Saminda Abeyruwan,
David B D’Ambrosio, Anish Shankar, Pierre Sermanet,
Pannag R Sanketi, and Corey Lynch. GoalsEye: Learn-
ing High Speed Precision Table Tennis on a Physical
Robot. In 2022 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), pages 10780–
10787. IEEE, 2022.
[21] Helei Duan, Jeremy Dao, Kevin Green, Taylor Apgar,
Alan Fern, and Jonathan Hurst. Learning Task Space
Actions for Bipedal Locomotion. In 2021 IEEE Interna-
tional Conference on Robotics and Automation (ICRA),
pages 1276–1282, 2021. doi: 10.1109/ICRA48506.
2021.9561705.
[22] Clemens Eppner, Sebastian H
¨
ofer, Rico Jonschkowski,
Roberto Mart
´
ın-Mart
´
ın, Arne Sieverling, Vincent Wall,
and Oliver Brock. Lessons from the Amazon Picking
Challenge: Four Aspects of Building Robotic Systems.
In Proceedings of Robotics: Science and Systems, An-
nArbor, Michigan, June 2016. doi: 10.15607/RSS.2016.
XII.036.
[23] Charles Freundlich, Michael Zavlanos, and Philippos
Mordohai. Exact bias correction and covariance esti-
mation for stereo vision. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 3296–3304, 2015.
[24] Kunihiko Fukushima. Visual Feature Extraction by a
Multilayered Network of Analog Threshold Elements.
IEEE Transactions on Systems Science and Cybernetics,
5(4):322–333, 1969. doi: 10.1109/TSSC.1969.300225.
[25] David Gallup, Jan-Michael Frahm, Philippos Mordohai,
and Marc Pollefeys. Variable baseline/resolution stereo.
In 2008 IEEE conference on computer vision and pat-
tern recognition, pages 1–8. IEEE, 2008.
[26] Wenbo Gao, Laura Graesser, Krzysztof Choromanski,
Xingyou Song, Nevena Lazic, Pannag Sanketi, Vikas
Sindhwani, and Navdeep Jaitly. Robotic Table Tennis
with Model-Free Reinforcement Learning. IROS, 2020.
[27] Yapeng Gao, Jonas Tebbe, Julian Krismer, and Andreas
Zell. Markerless Racket Pose Detection and Stroke
Classification Based on Stereo Vision for Table Tennis
Robots. IEEE Robotic Computing, 2019.
[28] Yapeng Gao, Jonas Tebbe, and Andreas Zell. Optimal
Stroke Learning with Policy Gradient Approach for
Robotic Table Tennis. CoRR, abs/2109.03100, 2021.
[29] Ali Ghadirzadeh, Atsuto Maki, Danica Kragic, and
M
˚
arten Bj
¨
orkman. Deep predictive policy training using
reinforcement learning. In 2017 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 2351–2358. IEEE, 2017.
[30] Xavier Glorot, Antoine Bordes, and Yoshua Bengio.
Deep Sparse Rectifier Neural Networks. In Geoffrey
Gordon, David Dunson, and Miroslav Dud
´
ık, editors,
Proceedings of the Fourteenth International Conference
on Artificial Intelligence and Statistics, volume 15 of
Proceedings of Machine Learning Research, pages 315–
323, Fort Lauderdale, FL, USA, 11–13 Apr 2011.
PMLR.
[31] Sergio Guadarrama, Anoop Korattikara, Oscar Ramirez,
Pablo Castro, Ethan Holly, Sam Fishman, Ke Wang,
Ekaterina Gonina, Neal Wu, Efi Kokiopoulou, Luciano
Sbaiz, Jamie Smith, G
´
abor Bart
´
ok, Jesse Berent, Chris
Harris, Vincent Vanhoucke, and Eugene Brevdo. TF-
Agents: A library for Reinforcement Learning in Ten-
sorFlow, 2018.
[32] Tuomas Haarnoja, Sehoon Ha, Aurick Zhou, Jie Tan,
George Tucker, and Sergey Levine. Learning to
walk via deep reinforcement learning. arXiv preprint
arXiv:1812.11103, 2018.
[33] Tuomas Haarnoja, Aurick Zhou, Pieter Abbeel, and
Sergey Levine. Soft actor-critic: Off-policy maximum
entropy deep reinforcement learning with a stochastic
actor. In Proceedings of the 35th International Confer-
ence on Machine Learning, pages 1861–1870. PMLR,
2018.
[34] J. Hartley. Toshiba progress towards sensory control
in real time. The Industrial Robot 14-1, pages 50–52,
1983.
[35] Richard Hartley and Andrew Zisserman. Multiple view
geometry in computer vision. Cambridge university
press, 2003.
[36] Hideaki Hashimoto, Fumio Ozaki, and Kuniji Osuka.
Development of Ping-Pong Robot System Using 7
Degree of Freedom Direct Drive Robots. In Industrial
Applications of Robotics and Machine Vision, 1987.
[37] Kasun Gayashan Hettihewa and Manukid Parnichkun.
Development of a Vision Based Ball Catching Robot. In
2021 Second International Symposium on Instrumenta-
tion, Control, Artificial Intelligence, and Robotics (ICA-
SYMP), pages 1–5. IEEE, 2021.
[38] Matt Hoffman, Bobak Shahriari, John Aslanides,
Gabriel Barth-Maron, Feryal M. P. Behbahani, Tamara
Norman, Abbas Abdolmaleki, Albin Cassirer, Fan Yang,
Kate Baumli, Sarah Henderson, Alexander Novikov,
Sergio G
´
omez Colmenarejo, Serkan Cabi, C¸ aglar
G
¨
ulc¸ehre, Tom Le Paine, Andrew Cowie, Ziyu Wang,
Bilal Piot, and Nando de Freitas. acme: A research
framework for distributed reinforcement learning.
[39] Yanlong Huang, Bernhard Sch
¨
olkopf, and Jan Peters.
Learning optimal striking points for a ping-pong playing
robot. IROS, 2015.
[40] Yanlong Huang, Dieter Buchler, Okan Koc¸, Bernhard
Sch
¨
olkopf, and Jan Peters. Jointly learning trajectory
generation and hitting point prediction in robot table
tennis. IEEE-RAS Humanoids, 2016.
[41] Jemin Hwangbo, Joonho Lee, Alexey Dosovitskiy,
Dario Bellicoso, Vassilios Tsounis, Vladlen Koltun, and
Marco Hutter. Learning agile and dynamic motor skills
for legged robots. Sci. Robotics, 4(26), 2019.
[42] Sebastian H
¨
ofer, Kostas Bekris, Ankur Handa,
Juan Camilo Gamboa, Melissa Mozifian, Florian
Golemo, Chris Atkeson, Dieter Fox, Ken Goldberg,
John Leonard, C. Karen Liu, Jan Peters, Shuran
Song, Peter Welinder, and Martha White. Sim2Real
in Robotics and Automation: Applications and
Challenges. IEEE Transactions on Automation
Science and Engineering, 18(2):398–400, 2021. doi:
10.1109/TASE.2021.3064065.
[43] Sergey Ioffe and Christian Szegedy. Batch normaliza-
tion: Accelerating deep network training by reducing
internal covariate shift. In International conference on
machine learning, pages 448–456. PMLR, 2015.
[44] Wenzel Jakob, Jason Rhinelander, and Dean Moldovan.
pybind11 – Seamless operability between C++11 and
Python, 2017. https://github.com/pybind/pybind11.
[45] Gangyuan Jing, Tarik Tosun, Mark Yim, and Hadas
Kress-Gazit. An End-To-End System for Accomplish-
ing Tasks with Modular Robots. In Proceedings of
Robotics: Science and Systems, AnnArbor, Michigan,
June 2016. doi: 10.15607/RSS.2016.XII.025.
[46] R.E. Kalman. A new approach to linear filtering and
prediction problems. Journal of Basic Engineering, 82
(1):35–45, 1960.
[47] Peter Karkus, Xiao Ma, David Hsu, Leslie Kaelbling,
Wee Sun Lee, and Tomas Lozano-Perez. Differ-
entiable Algorithm Networks for Composable Robot
Learning. In Proceedings of Robotics: Science and
Systems, FreiburgimBreisgau, Germany, June 2019. doi:
10.15607/RSS.2019.XV.039.
[48] Chase Kew, Brian Andrew Ichter, Maryam Bandari,
Edward Lee, and Aleksandra Faust. Neural Collision
Clearance Estimator for Batched Motion Planning. In
The 14th International Workshop on the Algorithmic
Foundations of Robotics (WAFR), 2020.
[49] Piyush Khandelwal, James MacGlashan, Peter Wurman,
and Peter Stone. Efficient Real-Time Inference in Tem-
poral Convolution Networks. In 2021 IEEE Interna-
tional Conference on Robotics and Automation (ICRA),
pages 13489–13495, 2021. doi: 10.1109/ICRA48506.
2021.9560784.
[50] Diederik P. Kingma and Prafulla Dhariwal. Glow: Gen-
erative Flow with Invertible 1x1 Convolutions, 2018.
[51] John Knight and David Lowery. Pingpong-playing robot
controlled by a microcomputer. Microprocessors and
Microsystems - Embedded Hardware Design, 1986.
[52] J. Kober, E. Oztop, and J. Peters. Reinforcement
Learning to adjust Robot Movements to New Situa-
tions. In Proceedings of Robotics: Science and Systems,
Zaragoza, Spain, June 2010. doi: 10.15607/RSS.2010.
VI.005.
[53] Okan Koc¸, Guilherme Maeda, and Jan Peters. Online
optimal trajectory generation for robot table tennis.
Robotics & Autonomous Systems, 2018.
[54] Torsten Kr
¨
oger. Opening the door to new sensor-based
robot applications—The Reflexxes Motion Libraries. In
2011 IEEE International Conference on Robotics and
Automation, pages 1–4. IEEE, 2011.
[55] Asai Kyohei, Nakayama Masamune, and Yase Satoshi.
The Ping Pong Robot to Return a Ball Precisely. 2020.
[56] Joonho Lee, Jemin Hwangbo, Lorenz Wellhausen,
Vladlen Koltun, and Marco Hutter. Learning
Quadrupedal Locomotion over Challenging Terrain.
CoRR, 2020.
[57] Jianlan Luo, Eugen Solowjow, Chengtao Wen,
Juan Aparicio Ojea, Alice M. Agogino, Aviv Tamar,
and Pieter Abbeel. Reinforcement Learning on
Variable Impedance Controller for High-Precision
Robotic Assembly. In 2019 International Conference
on Robotics and Automation (ICRA), pages 3080–3087,
2019. doi: 10.1109/ICRA.2019.8793506.
[58] Reza Mahjourian, Risto Miikkulainen, Nevena Lazic,
Sergey Levine, and Navdeep Jaitly. Hierarchical Policy
Design for Sample-Efficient Learning of Robot Table
Tennis Through Self-Play. arXiv:1811.12927, 2018.
[59] Horia Mania, Aurelia Guy, and Benjamin Recht. Simple
random search provides a competitive approach to rein-
forcement learning. arXiv preprint arXiv:1803.07055,
2018.
[60] Roberto Mart
´
ın-Mart
´
ın, Michelle Lee, Rachel Gardner,
Silvio Savarese, Jeannette Bohg, and Animesh Garg.
Variable Impedance Control in End-Effector Space. An
Action Space for Reinforcement Learning in Contact
Rich Tasks. In Proceedings of the International Con-
ference of Intelligent Robots and Systems (IROS), 2019.
[61] Michiya Matsushima, Takaaki Hashimoto, and Fumio
Miyazaki. Learning to the robot table tennis task-ball
control and rally with a human. IEEE International
Conference on Systems, Man and Cybernetics, 2003.
[62] Michiya Matsushima, Takaaki Hashimoto, Masahiro
Takeuchi, and Fumio Miyazaki. A learning approach
to robotic table tennis. IEEE Transactions on Robotics,
2005.
[63] Fumio Miyazaki, Masahiro Takeuchi, Michiya Mat-
sushima, Takamichi Kusano, and Takaaki Hashimoto.
Realization of the table tennis task based on virtual
targets. ICRA, 2002.
[64] Fumio Miyazaki et al. Learning to Dynamically Manip-
ulate: A Table Tennis Robot Controls a Ball and Rallies
with a Human Being. In Advances in Robot Control,
2006.
[65] Shotaro Mori, Kazutoshi Tanaka, Satoshi Nishikawa,
Ryuma Niiyama, and Yasuo Kuniyoshi. High-speed
humanoid robot arm for badminton using pneumatic-
electric hybrid actuators. IEEE Robotics and Automa-
tion Letters, 4(4):3601–3608, 2019.
[66] Katharina Muelling, Jens Kober, and Jan Peters. A
biomimetic approach to robot table tennis. Adaptive
Behavior, 2010.
[67] Katharina Muelling, Jens Kober, and Jan Peters. Learn-
ing table tennis with a Mixture of Motor Primitives.
IEEE-RAS Humanoids, 2010.
[68] Katharina Muelling, Jens Kober, Oliver Kroemer, and
Jan Peters. Learning to select and generalize striking
movements in robot table tennis. The International
Journal of Robotics Research, 2012.
[69] Katharina Muelling et al. Simulating Human Table
Tennis with a Biomimetic Robot Setup. In Simulation
of Adaptive Behavior, 2010.
[70] Urs Muller, Jan Ben, Eric Cosatto, Beat Flepp, and Yann
Cun. Off-Road Obstacle Avoidance through End-to-
End Learning. In Y. Weiss, B. Sch
¨
olkopf, and J. Platt,
editors, Advances in Neural Information Processing
Systems, volume 18. MIT Press, 2005.
[71] Anusha Nagabandi et al. Neural Network Dynamics
for Model-Based Deep Reinforcement Learning with
Model-Free Fine-Tuning. In ICRA, 2018.
[72] Michael Neunert, Thiago Boaventura, and Jonas Buchli.
Why off-the-shelf physics simulators fail in evaluating
feedback controller performance - a case study for
quadrupedal robots. 2016.
[73] Quan Nguyen, Ayush Agrawal, Xingye Da, William
Martin, Hartmut Geyer, Jessy Grizzle, and Koushil
Sreenath. Dynamic Walking on Randomly-Varying
Discrete Terrain with One-step Preview. In Proceedings
of Robotics: Science and Systems, Cambridge, Mas-
sachusetts, July 2017. doi: 10.15607/RSS.2017.XIII.
072.
[74] Edwin Olson. AprilTag: A robust and flexible visual
fiducial system. In 2011 IEEE International Conference
on Robotics and Automation, pages 3400–3407, 2011.
doi: 10.1109/ICRA.2011.5979561.
[75] OpenAI, Ilge Akkaya, Marcin Andrychowicz, Maciek
Chociej, Mateusz Litwin, Bob McGrew, Arthur Petron,
Alex Paino, Matthias Plappert, Glenn Powell, Raphael
Ribas, Jonas Schneider, Nikolas Tezak, Jerry Tworek,
Peter Welinder, Lilian Weng, Qiming Yuan, Wojciech
Zaremba, and Lei Zhang. Solving Rubik’s Cube with a
Robot Hand. 2019.
[76] Yunpeng Pan, Ching-An Cheng, Kamil Saigol, Keun-
taek Lee, Xinyan Yan, Evangelos Theodorou, and Byron
Boots. Agile Autonomous Driving using End-to-End
Deep Imitation Learning. In Proceedings of Robotics:
Science and Systems, Pittsburgh, Pennsylvania, June
2018. doi: 10.15607/RSS.2018.XIV.056.
[77] Xue Bin Peng, Marcin Andrychowicz, Wojciech
Zaremba, and Pieter Abbeel. Sim-to-Real Transfer of
Robotic Control with Dynamics Randomization. In
2018 IEEE International Conference on Robotics and
Automation, ICRA 2018, Brisbane, Australia, May 21-
25, 2018, pages 1–8. IEEE, 2018.
[78] Xue Bin Peng, Erwin Coumans, Tingnan Zhang, Tsang-
Wei Lee, Jie Tan, and Sergey Levine. Learning agile
robotic locomotion skills by imitating animals. arXiv
preprint arXiv:2004.00784, 2020.
[79] Dean A. Pomerleau. ALVINN: An Autonomous Land
Vehicle in a Neural Network. In D. Touretzky, editor,
Advances in Neural Information Processing Systems,
volume 1. Morgan-Kaufmann, 1988.
[80] Morgan Quigley, Ken Conley, Brian P. Gerkey, Josh
Faust, Tully Foote, Jeremy Leibs, Rob Wheeler, and
Andrew Y. Ng. Ros: an open-source robot operating
system. In ICRA Workshop on Open Source Software,
2009.
[81] Antonin Raffin, Ashley Hill, Adam Gleave, Anssi
Kanervisto, Maximilian Ernestus, and Noah Dormann.
Stable-Baselines3: Reliable Reinforcement Learning
Implementations. Journal of Machine Learning Re-
search, 2021.
[82] Tim Salimans, Jonathan Ho, Xi Chen, Szymon
Sidor, and Ilya Sutskever. Evolution Strategies as
a Scalable Alternative to Reinforcement Learning.
arXiv:1703.03864, 2017.
[83] John Schulman, Filip Wolski, Prafulla Dhariwal, Alec
Radford, and Oleg Klimov. Proximal policy optimiza-
tion algorithms. CoRR, abs/1707.06347, 2017.
[84] Anish Shankar, Stephen Tu, Deepali Jain, Sumeet
Singh, Krzysztof Marcin Choromanski, Saminda Wish-
wajith Abeyruwan, Alex Bewley, David B D’Ambrosio,
Jean-Jacques Slotine, Pannag R Sanketi, and Vikas
Sindhwani. Agile Catching with Whole-Body MPC and
Blackbox Policy Learning. In CoRL 2022 workshop on
Learning for Agile Robotics, 2022.
[85] Xingjian Shi, Zhourong Chen, Hao Wang, Dit-Yan
Yeung, Wai-Kin Wong, and Wang-chun Woo. Convo-
lutional LSTM network: A machine learning approach
for precipitation nowcasting. Advances in neural infor-
mation processing systems, 28, 2015.
[86] Laura Smith, J Chase Kew, Xue Bin Peng, Sehoon Ha,
Jie Tan, and Sergey Levine. Legged robots that keep
on learning: Fine-tuning locomotion policies in the real
world. In 2022 International Conference on Robotics
and Automation (ICRA), pages 1593–1599. IEEE, 2022.
[87] Laura Smith, Ilya Kostrikov, and Sergey Levine. A
walk in the park: Learning to walk in 20 minutes
with model-free reinforcement learning. arXiv preprint
arXiv:2208.07860, 2022.
[88] Yichao Sun, Rong Xiong, Qiuguo Zhu, Jingjing Wu,
and Jian Chu. Balance motion generation for a hu-
manoid robot playing table tennis. IEEE-RAS Hu-
manoids, 2011.
[89] Kah-Kay Sung. Learning and example selection for
object and pattern detection. 1996.
[90] Andy Swales et al. Open modbus/tcp specification.
Schneider Electric, 29:3–19, 1999.
[91] Jie Tan, Tingnan Zhang, Erwin Coumans, Atil Iscen,
Yunfei Bai, Danijar Hafner, Steven Bohez, and Vincent
Vanhoucke. Sim-to-Real: Learning Agile Locomotion
For Quadruped Robots. CoRR, abs/1804.10332, 2018.
[92] Jonas Tebbe, Yapeng Gao, Marc Sastre-Rienietz, and
Andreas Zell. A Table Tennis Robot System Using an
Industrial KUKA Robot Arm. GCPR, 2018.
[93] Jonas Tebbe, Lukas Krauch, Yapeng Gao, and An-
dreas Zell. Sample-efficient Reinforcement Learning in
Robotic Table Tennis. ICRA, 2021.
[94] Jack Valmadre, Alex Bewley, Jonathan Huang, Chen
Sun, Cristian Sminchisescu, and Cordelia Schmid. Lo-
cal metrics for multi-object tracking. arXiv preprint
arXiv:2104.02631, 2021.
[95] Patrick Varin, Lev Grossman, and Scott Kuindersma. A
Comparison of Action Spaces for Learning Manipula-
tion Tasks. In 2019 IEEE/RSJ International Conference
on Intelligent Robots and Systems (IROS), pages 6015–
6021, 2019. doi: 10.1109/IROS40897.2019.8967946.
[96] Yilei Wang and Ling Wang. Machine Vision-Based
Ping Pong Ball Rotation Trajectory Tracking Algorithm.
Computational Intelligence and Neuroscience, 2022,
2022.
[97] Tsung-Yen Yang, Tingnan Zhang, Linda Luu, Sehoon
Ha, Jie Tan, and Wenhao Yu. Safe reinforcement
learning for legged locomotion. In 2022 IEEE/RSJ
International Conference on Intelligent Robots and Sys-
tems (IROS), pages 2454–2461. IEEE, 2022.
[98] Andy Zeng, Shuran Song, Johnny Lee, Alberto Ro-
driguez, and Thomas Funkhouser. Tossingbot: Learning
to throw arbitrary objects with residual physics. IEEE
Transactions on Robotics, 36(4):1307–1319, 2020.
[99] Xingyi Zhou, Dequan Wang, and Philipp Kr
¨
ahenb
¨
uhl.
Objects as points. arXiv preprint arXiv:1904.07850,
2019.
[100] Xingyi Zhou, Vladlen Koltun, and Philipp Kr
¨
ahenb
¨
uhl.
Tracking objects as points. In European Conference on
Computer Vision, pages 474–490. Springer, 2020.
[101] Yifeng Zhu, Yongsheng Zhao, Lisen Jin, Jingjing Wu,
and Rong Xiong. Towards High Level Skill Learning:
Learn to Return Table Tennis Ball Using Monte-Carlo
Based Policy Gradient Method. IEEE International
Conference on Real-time Computing and Robotics,
2018.
APPENDIX
A. Author Contributions
1) By Type: Names are listed alphabetically.
• Designed or implemented the vision system: Michael
Ahn, Alex Bewley, David D’Ambrosio, Navdeep Jaitly,
Grace Vesom
• Designed or implemented the vision policy training in-
frastructure: Alex Bewley, David D’Ambrosio, Navdeep
Jaitly, Juhana Kangaspunta
• Designed or implemented the vision policy: Alex
Bewley, David D’Ambrosio, Navdeep Jaitly
• Designed or implemented the robot control stack:
Saminda Abeyruwan, Michael Ahn, David D’Ambrosio,
Laura Graesser, Atil Iscen, Navdeep Jaitly, Satoshi
Kataoka, Sherry Moore, Ken Oslund, Pannag Sanketi,
Anish Shankar, Peng Xu
• Designed or implemented the real world gym en-
vironment: Saminda Abeyruwan, David D’Ambrosio,
Laura Graesser, Satoshi Kataoka, Pannag Sanketi, Anish
Shankar
• Designed or implemented the simulator: Saminda
Abeyruwan, Erwin Coumans, David D’Ambrosio,
Laura Graesser, Navdeep Jaitly, Nevena Lazic, Reza
Mahjourian, Pannag Sanketi, Anish Shankar, Avi Singh
• Designed or implemented the visualization: Yuheng
Kuang, Anish Shankar
• Designed or implemented the nightly monitoring:
Saminda Abeyruwan, Omar Cortes, David D’Ambrosio,
Laura Graesser, Pannag Sanketi, Anish Shankar
• Robot operations and mechanical engineering: Jon
Abelian, Justin Boyd, Omar Cortes, Gus Kouretas, Thinh
Nguyen, Krista Reymann
• Designed or implemented learning infrastructure
and algorithms: Krzysztof Choromanski, Tianli Ding,
Wenbo Gao, Laura Graesser, Deepali Jain, Navdeep
Jaitly, Nevena Lazic, Corey Lynch, Avi Singh, Saminda
Abeyruwan, Anish Shankar
• Designed or implemented control policy architectures:
Tianli Ding, Laura Graesser, Navdeep Jaitly
• Ran experiments for the paper: Alex Bewley, David
D’Ambrosio, Laura Graesser, Atil Iscen, Deepali Jain,
Anish Shankar
• Wrote the paper: Saminda Abeyruwan, Alex Bewley,
David D’Ambrosio, Laura Graesser, Atil Iscen, Deepali
Jain, Ken Oslund, Anish Shankar, Avi Singh, Grace
Vesom, Peng Xu
• Core team: Saminda Abeyruwan, Alex Bewley, David
D’Ambrosio, Laura Graesser, Navdeep Jaitly, Krista Rey-
mann, Pannag Sanketi, Avi Singh, Anish Shankar, Peng
Xu
• Managed or advised on the project: Navdeep Jaitly,
Pannag Sanketi, Pierre Sermanet, Vikas Sindhwani, Vin-
cent Vanhoucke
• Table tennis coach: Barney Reed
2) By Person: Names are listed alphabetically.
Jonathan Abelian: Day to day operations and thrower
maintenance.
Saminda Abeyruwan: Worked on multiple components
including: real gym environment, optimizing runtime for
high frequency control, simulator, system identification, ball
distribution protocol. Wrote parts of paper related to ball
distribution mapping and real environment design.
Michael Ahn: Built an earlier version of the vision infras-
tructure; built the low-level ABB/Festo control infrastructure.
Alex Bewley: Led the design and implementation for the
vision system. Built components for data infrastructure and
model training. Performed noise and bias analysis for different
camera configurations. Assisted with experimentation. Collab-
orated on paper writing and editing.
Justin Boyd: Designed fixtures, tuned and calibrated vision
system, robot bring-up and integration.
Krzysztof Choromanski: Built the ES distributed opti-
mization engine for all ES experiments with Deepali Jain.
Co-author of the BGS algorithm with Deepali Jain. Led the
research on distributed ES optimization for the project. Ran
several ES experiments throughout the project.
Omar Cortes: Assisted with experiments and fine-tuning
and maintained the systems’ integrity through nightly test
monitoring.
Erwin Coumans: Helped set up the simulation environ-
ment using PyBullet and provided simulation support. Also
developed early prototypes for exploring the system.
David D’Ambrosio: Worked on the system across multi-
ple parts including: vision, robot control, gym environment,
simulation, and monitoring. Coordinated paper writing, wrote
and edited many sections and edited the video. Ran several
ablation studies. Coordinated with operations.
Tianli Ding: Implemented Goal’sEye learning infrastruc-
ture, conducted extensive experiments to train goal-targeting
policies.
Wenbo Gao: Experimentation with ES methods and devel-
oping curriculum learning for multi-modal playstyles.
Laura Graesser: Worked on multiple parts of the system
including: simulation, policy learning, real gym environment,
robot control. Shaped paper narrative, wrote in many sections,
and edited throughout. Designed and ran simulation parame-
ters system studies.
Atil Iscen: Added the task space controller and observation
space. Trained and deployed policies in task space. Compiled
experimental results and contributed to writing for these sec-
tions.
Navdeep Jaitly: Conceived, designed, and led the initial
stages of the project, built and sourced multiple prototypes,
laid the foundation for the design of major systems like
control and vision. Created initial vision inference pipeline
and supervised algorithm development.
Deepali Jain: Built the ES distributed optimization en-
gine used for all policy training experiments with Krzysztof
Choromanskii. Co-author of the BGS algorithm with Krzysztof
Choromanski. Ran several ES experiments throughout the
project. Conducted ablation study comparing ARS and BGS
techniques for the paper.
Juhana Kangaspunta: Built an early version of the com-
puter vision system used in the robot and created a labeling
pipeline.
Satoshi Kataoka: Developed and maintained the cus-
tom MPI system. Initial consultation on cameras and other
infrastructure-related components.
Gus Kouretas: Work cell assembly and day to day opera-
tion.
Yuheng Kuang: Technical lead for data infrastructure and
provided visualization tools.
Nevena Lazic: Built an initial version of the simulator,
implemented and ran initial ES experiments.
Corey Lynch: Implemented GoalsEye learning infrastruc-
ture and advised on goal-targeting experiments.
Reza Mahjourian: Built an initial version of the simulator,
developed early RL agent control, and defined the land ball
task.
Sherry Q. Moore: Control, sensing and ball-thrower in-
frastructure decisions. Designed and implemented the first
working version of C++ control stack.
Thinh Nguyen: Thrower mechanical design, linear axis
design and maintenance, ball return system design, and day-
to-day operations.
Ken Oslund: Designed and implemented the C++ client
and controller backend along with the bindings which make
them interoperable with Python. Also directly wrote several
paragraphs in the final paper.
Barney J Reed: Expert table tennis advisor, coaching
engineers, human data collection.
Krista Reymann: Operations project manager, overseeing
operations team, sourcing parts and resources, coordinating
with vendors and managing repairs.
Pannag R Sanketi: Overall lead on the project. Guided
the algorithm and system design, wrote parts of the system,
advised on the research direction, managed the team, project
scoping and planning.
Anish Shankar: Core team member working on the sys-
tem across multiple parts including: performance, hardware,
control, tooling, experiments.
Pierre Sermanet: Advised on the GoalsEye research.
Vikas Sindhwani: Initiated and developed ES research
agenda for table tennis and catching. Supported and advised
on an ongoing basis. Edited the paper.
Avi Singh: Worked on multiple parts of the system, focusing
on simulation and learning algorithms. Helped write the paper.
Vincent Vanhoucke: Infrastructure decisions, project scop-
ing and research milestones.
Grace Vesom: Built the camera driver and an early version
of the ball detection pipeline. Built camera calibration software
and hardened camera hardware stability.
Peng Xu: Worked on early versions of many parts of the
system including: vision, robot control, and designing the
automatic ball collection. Wrote part of the paper.
3) Contact Authors: {bewley, ddambro,
lauragraesser, psanketi}@google.com
B. Hardware Details
1) Host Machines: The entire system is run on a single
Linux host machine with an AMD Ryzen Threadripper 3960X
and multiple NVIDIA RTX A5000 accelerators. One accel-
erator handles perception inference and another encodes the
images from the cameras with nvenc for storage (see Appendix
M). Policy inference runs on CPU. The standard robot policies
are so small that the time to transfer the input data from CPU
to accelerator exceeds any savings in running inference on the
accelerator.
Previous iterations of this system used a dual Intel Xeon E5-
2690s, two Nvidia Titan V accelerators, and a Quadro M2000.
The Quadro handled video encoding and the two Titans
each handled a single camera stream in an older iteration
of the perception system that could not maintain framerates
without splitting the load across multiple GPUs. The current
system was a substantial upgrade in terms of performance; by
switching machines perception inference latency halved.
2) Robots: The configuration of arm and gantry was ini-
tially prototyped with a Widow-X arm kit and one-dimensional
Zaber linear stage. The Widow-X was comprised of several
hobbyist Dynamixel servos. The gripper the arm came with
was made to hold a table tennis paddle. This prototype was
nowhere near as capable as the current set of arms used in
the system (see Figure 9) but it was able to regularly return
simple balls, enabling testing of many initial ideas. Ultimately
a small-scale system like this was not meant to survive long
term frequent use: the repeated hitting motions and impact
of the balls would strip the delicate internal gears of the
servos, which was a major factor in pursing industrial robots
for reliability and robustness.
3) Ball Thrower: Existing consumer table tennis ball
throwers offer a high level of customization and capability
but require some sort of manual input to operate. However,
the construction of the devices are not easy to replicate.
Therefore all iterations of ball throwers in this system took
some form of off-the-shelf device and made it more auto-
mated and robust. Initially, reverse engineering, breadboards,
and a programmable microcontroller were used to simulate
the manual inputs through a USB interface. Ultimately, a
more robust system was required and a simpler thrower was
obtained and almost all the electronic components of were
replaced. Aside from being more repairable and reliable, the
customized thrower has higher quality parts including motors
with encoders that can provide feedback to the system to alert
if there is a failure or reduction in performance. A ”throw
detection” sensor has also been added in the form of two
infrared sensors in the nozzle. This sensor reports back when
a ball has been thrown as well as an approximation of the
speed, based on the time between when the two sensors were
triggered.
Although the current thrower is more reliable, it is not built
to the specifications of the industrial robots in the rest of the

Fig. 9: Two ABB arms — ABB-IRB120T (left), ABB IRB 1100-4/0.58 (center) — and their end effector (right). Most
experiments in the paper use the 120, but the task space experiments in Section III-D were able to transfer to the 1100 with
minimal modifications despite the different joint layout.
system. The two wheels that launch the balls make physical
contact with them degrade over time and get dirty, requiring
cleaning.
C. Control Details
1) Additional Communication Protocols: As discussed in
Section II-B, ABB arms are controlled through the Externally
Guided Motion (EGM) interface [1]. However, the robot
requires an additional interface Robot Web Services (RWS)
provided by ABB to control basic functions. RWS is a
RESTful interface to the robot that allows access to various
variables and subroutines on the robot with simple POST and
GET requests. The main usage of RWS is to reset the robot
at the beginning of an experiment or when there is a problem,
and to start the onboard EGM server.
2) Python to C++ Interface: The interface between Python
and C++ is implemented with Pybind11 [44]. This library
provides a convenient and compact syntax for calling C++
functions from Python and passing values in both directions
between the languages. However, just wrapping function calls
in the low-level driver with Pybind11 is insufficient because
those functions would still execute in the Python thread,
subjecting them to all the same performance constraints as
regular Python threads. Releasing the GIL while executing
the C++ function is possible but would not help due to the
overhead of switching thread contexts.
Instead, a pure-C++ thread is started to handle low-level
control for each of the Festo and ABB robots. These threads
do not access any Python data directly, so they do not require
the GIL and can execute in parallel to each other and the
Python thread. Communication with these threads is done
asynchronously via circular C++ buffers. C++ mutexes protect
access to these buffers and ensure thread-safety, but they only
have to be held briefly for read and write operations, not for
an entire control cycle. This low-level controller can be used
independently from Python (ie, in a pure-C++ program), but
in this system, the circular buffers are accessed from Python
via Pybind11-wrapped C++ function calls.
Each loop iteration of the low-level controller checks for
a new command sent from Python. If none is available, it
executes the remainder of the loop iteration with the previously
sent command. Since the mutex protecting communication
with the Python thread is only held briefly, this helps isolate
the low-level controller from timing variation in the Python
thread, thereby increasing robustness. Minimizing latency
variation contributed more to improving performance than
minimizing the absolute latency because the policies could
learn to account for that latency in simulation.
3) Robot Lockups and System Identification: The ABB
arms are primarily operated using the EGM interface. A se-
quence of commands are transmitted at 248Hz which includes
a position and speed reference parameter per joint. The arms
are sensitive to the commands and can lockup by tripping a
hardware safety stop in several situations including:
1) Physical collisions are detected
2) Joints are predicted to exceed ranges
3) Joints are being commanded to move too fast and have
hit internal torque limits.
These safety stops are controlled by an ABB proprietary
hardware controller whose predictions are not accessible in
advance so as to pro-actively avoid them. Safety lockups freeze
the robot. At best they interrupt experiments, and at worst
cause joints to physically go out of range requiring manual re-
calibration. It was therefore important to implement mitigation
in the control stack to prevent sending commands that would
cause the robot to lockup. In addition, the actual movement of
the arm in response to a position + speed reference command
is internally processed by the hardware controller using a low
pass filter + speed/position gain parameters. For the above
reasons a system identification of the arms was performed to
infer such parameters and uses them to both bring parity with
simulation and prevent safety stops.
The agents produce velocity actions. In simulation these
are directly interpreted by the PyBullet simulator. On the real
robot system they are run through the safety simulator stack as
described in II-B, providing a position and velocity per joint
of the arm to reach. Directly using this result as a position
+ speed reference to the ABB arms does not faithfully move
the arms through the same trajectory as seen in simulation.
While the position portion of the command is accurate (fol-
lowing the exact intended), the speed reference parameter is
interpreted differently by the hardware controller through gain
parameters. The actual speed reference command is modeled
as a combination of the velocity + torque, scaled by varying

gain factors per component and joint. These gain factors
were learned through a process of system identification, by
optimizing them with a blackbox parameter tuning framework.
The optimization objective was to minimize differences vs the
trajectory described by the position portion of the commands.
This tuning process replays some trajectories with different
gain parameters to find the optimal way to set the speed
reference portion. The result was fixed multiplicative gain
factors that were primarily driven by the per-joint velocity as
obtained from the safety simulator to use as the optimal speed
reference command.
The problem of avoiding safety stops is mitigated in a
few ways. First the safety simulator predicts collisions and
sends the ”bounced-back” commands so that they don’t collide
with environment as described earlier. Secondly to prevent
exceeding joint ranges, a predictive system caps the speed
reference portions of the command as the robot gets closer
to the joint limits. The system predicts motion of the joint
from the commanded position + an assumed inertial motion
using the speed reference projected 250ms into the future
and caps the speed ref portion of the command to prevent
the predicted position from exceeding joint limits. This was
modelled experimentally to identify the cases in which the
hardware controller faults due to exceeding joint ranges, which
helped discover this predictive window of 250ms. Lastly, over-
torquing is minimized by reducing the safety simulator’s max
joint force limits.
D. Simulation Details
Four desiderata guided the design of the simulator.
1) Compatibility with arbitrary policy training infrastruc-
ture so as to retain research flexibility, motivating the
choice to conform to the Gym API.
2) Flexibility, especially for components that researchers
experiment with often, such as task definition, obser-
vation space, action space, termination conditions, and
reward function.
3) Simulation-to-reality gap is low. “Low” means (1) al-
gorithmic or training improvements demonstrated in
simulation carry over to the real system and (2) zero-shot
sim-to-real policy transfer is feasible. Perfect transfer
is not required — 80%+ of simulated performance is
targeted.
4) Easy to apply domain randomization to arbitrary physi-
cal components.
The design isolates certain components so they are easy to
iterate on. For example, the tasks are encoded as sequences of
states. Transitions between states are triggered by ball contact
events with other objects. The task of a player returning
a ball launched from a ball thrower is represented by the
following two sequences. The first is P 1
LAUNCH (the
ball is in flight towards the player after being launched from
the thrower) → P1
T ABLE (the ball has bounced on the
player’s side of the table) → P 1
P ADDLE (the player hit
the ball) → P 2 T ABLE (the ball landed on the opponent’s
side of the table) → DONE P 1 W INPOIN T. The second
is P 1
LAUNCH → P 1 T ABLE → P 1 P ADDLE →
P 1
NET (the ball just hit the net) → P 2 T ABLE →
→ DONE
P 1 W INP OINT . This accounts for the case
where the ball first hits the net after being hit by the player and
then bounces over and onto the opponent’s side of the table.
All other sequences lead to DON E
P 1 LOSEP O INT .
For each task the complete set of (state, event) →
next_state triplets is enumerated in a config file. Tasks
are changed by initializing the StateMachine with different
configs.
Another example is the reward function. It is common
practice in robot learning, especially when training using the
reinforcement learning paradigm, for the scalar reward per step
to be a weighted combination of many reward terms. These
terms are often algorithm and task dependent. Therefore it
should be straightforward to change the number of terms, the
weight per term, and to implement new ones. Each reward term
is specified by name along with its weight in a config. The
RewardManager takes in that config and handles loading,
calculating, and summing each component. If a user wants
to try out a new reward term, they write a reward class
conforming to the Reward API (see below), which gets
automatically registered by the RewardManager, and add
it and its weight to the config. Over 35 different reward
components have been tried ≈ 20 are in active use.
1) Latency: The latency of key physical system compo-
nents were empirically measured as follows. Timing details are
tracked starting with when the system receives hardware inputs
(perception and robot feedback), through various transforma-
tions and IPCs (including policy inference), to when actual
hardware commands are sent. This tracing gives a drill-down
of latency throughout the stack with the ability to get mean and
percentile metrics. The other half of the latency is how long
the robot hardware takes to physically move after being given
a command, which is separately measured by comparing time
between a command being issued and receiving a feedback for
reaching it. This completes the latency picture, covering the
full time taken across the loop. See Table VI 100% (baseline)
column for the default latency values per component.
2) Ball distributions: Modeling the ball has two compo-
nents, the dynamics and training distribution. PyBullet models
the contact dynamics and the in-flight ball dynamics are
modeled as in Abeyruwan et al. [2]. Drag is modelled with a
fixed coefficient of 0.47 but neither an external Magnus nor
wind force is applied to the ball in the simulation. We refer
readers to [2] Appendix C4 for more details on the in-flight
ball model. The initial position and velocity of the balls are
derived following Abeyruwan et al. [2] and this determines the
distribution of balls that are sampled during simulated training.
See Table VII Thrower (baseline) column for the parameters of
the default ball distribution used for training the BGS policies
in this paper.
3) Physical Parameters: The restitution coefficients of the
ball, table, and paddle, and the friction of the paddle are
measured using the method from [28]. The mass of the ball and
paddle is also measured. All other components have estimated
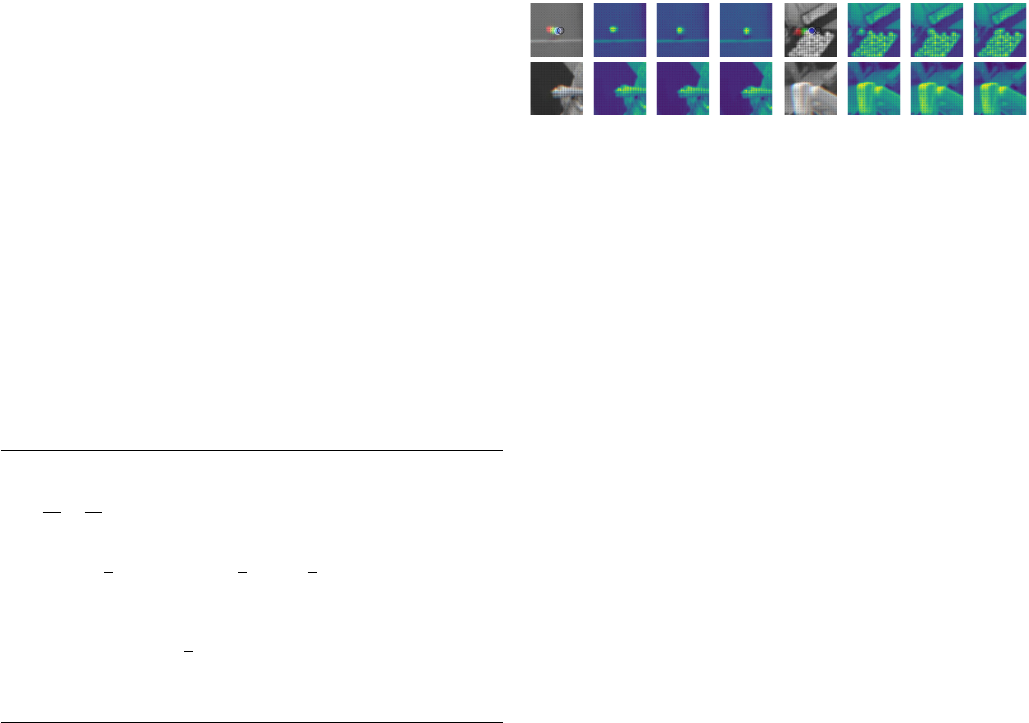
un-tuned values or use PyBullet defaults. See Table VIII Tuned
(baseline) column for the values used.
4) Gymnasium API: The real world and simulated environ-
ments were developed according to the Gymnasium standard
API for reinforcement learning
5
. Dictionary formats are used
for observation and action specifications (for further details
on individual components, see Appendix F). All extended
environment functionalities are implemented as wrappers. In
addition, the environments are compatible with agent learn-
ing frameworks, for example, TF-Agents [31], ACME [38],
Stable-Baselines3 [81], and so on. For consistent policy evalu-
ation in simulation and hardware, TF-Agent’s Actor API is em-
ployed. All the supported policies (section II-G) are wrapped
in PyPolicy and integrated to Actor API. TF-Agents provides
transformations to convert the Gymnasium environment to a
PyEnvironment.
5) Reward API: The Reward class API is outlined below.
Latex code style from [50].
class Reward:
def init (self, ∗kwargs):
# Initializes the reward class.
def compute reward(self, state machine data, done, ∗kwargs):
# Computes and returns the reward per step along with a
dictionary which optionally contains reward specific
information.
return reward, reward info
def reset(self, done):
# Resets any stored state as needed when the episode is done.
E. Perception Details
1) Cameras and Calibration: Previous iterations of the
system included a variety of other camera types and posi-
tions. Larger arrays of slower cameras were effective during
prototyping for basic ball contact, but struggled on tasks that
required more accurate ball positioning. Adding more cameras
to the current setup could produce still more accurate position
estimations, but there start to be bandwidth limitations on
a single machine and it may require remote vision devices
(increasing latency and system complexity) or switching away
from USB3.
Cameras are calibrated individually for intrinsic parameters
first and later calibrated extrinsically to the table coordinate
system via sets of AprilTags [74] placed on the table. Both
calibrations are done with APIs provided by OpenCV [11].
Calibration is an important factor in the performance of the
system given the small size of the ball it needs to track. While
it is relatively easy to get decent camera performance with
basic camera knowledge, it required the help of vision experts
to suggest hardware solutions like lens spacers and locks as
well as calibration tools such as focus targets to get truly stable
performance.
5
https://github.com/Farama-Foundation/Gymnasium
Fig. 10: Examples of training patches for the Ball detector
which consist of the past three frames. The left-most RGB
formatted patch is for visualization purposes to highlight the
motion of the ball in play with the current and next labeled
position indicated with white and black circles respectively.
The three single channel images to the right of the RGB image
show the raw Bayer pattern as expected by the detector. Top
row shows two sequences of three frames centered on the
final ball position (modulo 2 to match Bayer stride). Bottom
row shows hard negative examples where the center position
contains a bright spot with some motion originating from a
person carrying a ball-in-hand or from the robot itself.
2) Patch based Training Data: Figure 10 shows some
examples of the patches extracted from the raw Bayer images
used to train the ball detector network. These patches are cen-
tered on the ball in the current frame where the two previous
frames are included to prime the temporal convolutional layers
within our custom architecture.
3) Ball Detector Network Structure: The spatial convolu-
tion layers capture shape and color information whilst down-
sampling the image size to reduce computation. Operating on
the single channel raw images means it is important that the
first layer has a 2 × 2 stride matching the Bayer pattern, so
that the weights of the convolutional kernel are applied to
the same colored pixels at all spatial locations. In total, five
convolutional layers are applied with the first three including
batch normalization [43] before a ReLU activation [24, 30].
Two of these layers employ a buffered temporal mechanism
resulting in an extremely compact network overall with only
27K parameters. Full details of the architecture is shown in
Table II. Note that the shape is represented as (B, H, W, C)
corresponding to the typical batch size, height, width and
channels, however during inference the batch is set to the
number of cameras. Also note that in contrast to typical
temporal convolutions operating on video data there is no time
dimension. Instead the temporal convolutional layers simply
concatenate their previous input to the current features along
the channel dimensions. Here the next convolutional layer with
weights will effectively span two timesteps.
4) Tracking Performance: To assess tracking performance
independently of the downstream processes, the output of
the perception pipeline is compared against human annotated
ball positions. These annotations capture the ball’s image
position in each camera view for the entire duration the ball
is considered in-play, i.e. has not touched the ground or any
object below the table height. Both views are recombined with
annotations, triangulated to their 3D position, and stitched over
time into 3D trajectories.
For tracking evaluation the 3D trajectories of the ball across

Layer Type Kernel Size Strides Dilation Rate Output Size # Trainable Parameters
Input – – – (2, 512, 1024, 8) –
2D Spatial Convolution 4 2 1 (2, 256, 512, 8) 128
Batch Norm 16
Buffered Temporal Convolution – – – (2, 256, 512, 16) –
2D Spatial Convolution – – 2 (2, 256, 512, 8) 1152
Batch Norm 16
2D Spatial Convolution 4 2 1 (2, 128, 256, 16) 2048
Batch Norm 32
Buffered Temporal Convolution – – – (2, 128, 256, 32) –
2D Spatial Convolution – – 1 (2, 128, 256, 64) 18496
Dropout (drop-rate=0.1) – – – (2, 128, 256, 64) –
Prediction Head 4 – 2 (2, 128, 256, 5) 5125
Optimizer Adam (α = 1e−4, β
1
= 0.9, β
2
= 0.999)
Learning Rate Schedule Linear ramp-up (5000 steps) then exponential decay.
Batch size 128
Weight decay None
TABLE II: Ball Detector, Architecture and Training Details. All layers employ ReLU non-linearities.
Training Data Source ATA ATR ATP
With HNM 66.4 % 69.0 % 64.0 %
Without HNM 58.5 % 64.0 % 53.8 %
TABLE III: Ball tracking performance comparing different
training datasets including hard negative mining (HNM). Av-
erage tracking accuracy (ALTA) is the key metric used for
tracking quality over the local temporal horizon of 100 frames
with a < 5cm true positive criteria. ATR and ATP denote the
average tracking recall and precision respectively [94].
10 annotated sequences are used as target reference positions
consisting of 514 annotated trajectories over 93,978 frames.
To measure the alignment of predicted trajectories to these
annotations, the recently proposed Average Local Tracking
Accuracy (ALTA) metric [94] is applied by defining a true
positive detection as the predicted 3D position of the ball at
time t to correspond to with in 5cm of the annotated position
in frame t. Since the temporal aspect of the tracking problem is
important from both a short history as used by the policy and
a longer history for locating hits and bounces by the referee
(Section II-E) the temporal horizon of ALTA is set to 100
frames with the results reported in Table III. These results
show the benefit that hard negative mining can bring to a
patch-based training method.
F. Real World Details
1) Referee: The primary role of the Referee is to gener-
ate ball and robot contacts to drive the StateMachine,
RewardManager, and DoneManager as defined in Sec-
tion II-G. The different contact events are as follows;
TABLE_ARM (ball contact with robot side of the table),
TABLE_OPP (ball contact with opponent side of the table),
PADDLE_ARM (ball contact with robot paddle), NET (ball
contact with net), GROUND (ball contact with the ground),
TABLE (robot contact with table), and STAND (robot contact
with stand). The real environment and the referee communi-
cate using a custom MPI (ROS [80] is an alternative), where
the Referee initializes a server and the environment uses a
client to request reward, done and info at step frequency. The
Referee updates its internal state at 100 Hz regardless of the
step frequency.
2) Real gym environment: The real environment interfaces
with the policy and hardware. In addition to the real world
challenges described in Section II-E, it must also ensure the
environment step lasts for the expected duration given the en-
vironment Hz. An adaptive throttling function facilitates this.
The throttling function is initialized with the first observation.
When the next step call completes, the throttler waits for the
remaining time of the environment timestep before returning.
If the next step call consumes more computational time than
the timestep budget, the throttler advances to the next nearest
multiple of the timestep. Both the actor and environment run
on the same thread, therefore, the timestep also consumes the
computational time required by the policy. A recommendation
is that if the policy requires more computational time than
timestep budget, either reduce the step frequency or use an
asynchronous policy framework.
3) Subprocesses: The actor, environment, and referee com-
ponents are implemented using Python, therefore, process
speedup is limited by the GIL. Threading increased process
contention and the sim-to-real gap. If a process is known to
get throttled by thread contention or a high computational
workload, the code should be distributed to a different process.
4) Observation Filters: The system uses the Savitzky-
Golay FIR filter [5] for observation smoothing in
TableTennisRealEnv and Referee. The filter
coefficients were calculated once for a window length
of 9 and a 1-D convolution is applied for each sensor
modality independently. For boundary values, input is
extended by replicating the last value in the buffer.
The real environment uses interpolation/extrapolation to
generate observations for the given timestep. Noise from the
sensor can cause the interpolated/extrapolated values to show
a zig-zag pattern. In some cases, where a false positive ball
observations occurs, the calculated value does not generate an

Hyper-parameter Value
Number of directions (δ), N 200
Number of repeats per direction, m 15
Number of top directions, k 60
Direction standard deviation, σ 0.025
Step size, α 0.00375
Normalize observations True
Maximum episode steps 200
Training iterations 10,000
TABLE IV: Hyper-parameters used for training BGS policies
in simulation.
Reward Min. per episode Max. per episode
Hit ball 0 1.0
Land ball 0 1.0
Velocity penalty 0 0.4
Acceleration penalty 0 0.3
Jerk penalty 0 0.3
Joint angle 0 1.0
Bad collision -1 0
Base rotate backwards -1 * timesteps 0
Paddle height -1 * timesteps 0
Total variable 4.0
TABLE V: Rewards used for training BGS policies in simu-
lation.
observation within the expected observation range. Feeding
these observations to real policy tends to produce jittery or
unsafe actions. Similarly, Referee filters raw observations
prior to being used to calculate ball contacts.
G. Training Parameters
Table IV contains the hyper-parameter settings and Table V
details the rewards used for training the BGS policies in this
paper. A brief description of each reward is given below.
• Hit ball: +1 if the policy makes contact with the ball, 0
otherwise.
• Land ball: +1 if the policy successfully returns the ball
such that it crossed the net and lands on the opposite side
of the table.
• Velocity penalty: 1 - % points (timesteps * number of
joints) which violate the per joint velocity limits: [1.0,
2.0, 4.5, 4.5, 7.6, 10.7, 14.5]m/s.
• Acceleration penalty: 1 - % points (timesteps * number
of joints) which violate the per joint acceleration limits:
[0.2, 0.2, 1.0, 1.0, 1.0, 1.5, 2.5, 3.0]m/s
2
.
• Jerk penalty: 1 - % points (timesteps * number of joints)
which violate the per joint jerk limits: [0.92, 0.92, 1.76,
0.9, 0.95, 0.65, 1.5, 1.0]m/s
3
.
• Joint angle penalty: 1 - % points (timesteps * number of
joints) which lie outside the joint limits (minus a small
buffer).
• Bad collision: -1 per timestep if the robot collides with
itself or the table, 0 otherwise. The episode typically ends
immediately after a bad collision, hence the minimum
reward of -1.
• Paddle height penalty: -1 for every timestep the center of
the paddle is < 12.5cm above the table, 0 otherwise.
• Base rotate backwards penalty: -1 each timestep the base
ABB joint has position <-2.0 (rotated far backwards).
H. Simulator Parameter Studies: Additional Results & Details
This section contains additional details about the simulator
parameter studies. First we discuss additional results and then
give details of all the parameter values for each study.
1) Additional Results: We present additional results from
the simulator parameter studies. In Section III-A we assessed
the effect of varying simulator parameters on the zero-shot
sim-to-real transfer performance. Here we discuss the effect
on training quality, defined as the percentage of the 10 training
runs that achieved ≥97.5% of the maximum score during train-
ing. Agents with scores above this threshold effectively solve
the return ball task. The results are presented in Figure 12.
Training contains significant randomness from two main
sources. First the environment has multiple sources of random-
ness; primarily from the ball distribution, latency sampling
and observation noise, but also from domain randomization
of some physical parameters and small perturbations to the
robot’s initial starting position. The extent of the environment
randomness in each of these areas is affected by parameter val-
ues. Second, randomness comes from the training algorithm,
BGS. During each BGS training step, directions are randomly
sampled and a weighted average of a subset of these forms
the update to the parameters.
Additionally, there appears to be distinct learning phases for
the return ball task, with corresponding local maxima. Two
common places for training to get stuck are (1) a policy never
learns to make contact with the ball and (2) a policy always
makes contact with the ball but never learns to return it to the
opposite side.
Consequently, we observe that about 70% of training runs
with the baseline parameters settings solve the problem. Sub-
stantially reducing latency to 0-20% appears to make the
task harder. Only 40% of runs in these settings train well
(see Figure 12 (top left)). Removing observation noise (see
Figure 12 (top right)) makes the problem easier, with 90%
runs training well. Increasing zero-mean noise does not affect
training quality for the settings tested, however introducing
biased noise does appear to make the problem much harder,
with only 30% runs training well. Changing the ball distribu-
tion (see Figure 12 (bottom left)) does not have a meaningful
impact on training quality except in one case. All training
runs for the different thrower distribution (thrower 2) failed
to reach the threshold in 10k steps. This is likely because
the ball distribution is more varied than baseline, medium, or
wide distributions (see Figure 15). However no policies got
stuck in local maxima. All achieved 93% of the maximum
reward and 50% achieved 95%. This is unlike the low latency
or biased observation noise settings where 20-60% runs got
stuck in local maxima. Finally, changing the values of different
physical parameter settings appears to make the task slightly
easier, with all experiments having 80-90% of runs that trained
well compared with the baseline 70% (see Figure 12 (bottom
right)).

Fig. 11: Ball collection system. Images from left to right. (I) Air blows down from a ceiling mounted fan, pushing any balls
on the table down to the floor. (II-top) & (II-bottom) Blower fans at each corner push the balls around the table. (III) At one
corner of the table is a ramp that guides the balls to a tube... (IV-top) ...where air pushes them to a higher ramp... (IV-bottom)
...which returns balls to the thrower’s hopper.
Fig. 12: Effect of simulator parameters on training quality
defined as % runs ≥ 97.5 maximum reward. Most settings
are similar to baseline performance of 70%. Notably very low
latency (0-20%), biased observation noise ([0,8]cm), and large
ball distributions (thrower 2) make the task harder and reduce
the % of runs that trained well within 10k training steps. R =
restitution coefficient.
I. Simulator Parameter Studies: Physical parameter measure-
ments, revisited
It was unsatisfactory not to follow the process outlined in
Appendix D to set physical parameter values in the simulator.
In Section III-A we hypothesized this was due to not modeling
spin correctly. To investigate this, we modeled spin in the
simulator following the method from [2]. We extended the
simulation ball model to incorporate the magnus force. Then
we collected a set of ball trajectories from a ball thrower. For
each trajectory we set up an optimization problem to solve
for the initial position, linear velocity, and angular velocity of
Fig. 13: (Top) Percent of seeds that solve the task (% runs
≥ 97.5% max training return) when trained in task space,
combined with the damped (harder) environment. (Bottom)
Zero shot transfer results of the seeds that succeeded the
training.
the ball, and used these values to derive ball distributions in
simulation.
During the same time period we also changed the paddle
on the robots to a Tenergy 05
6
. This paddle has a softer
and higher friction surface than the previous paddle and can
impart substantially more spin on the ball. We re-measured
the physical parameters of the system following the process
described in Appendix D. We performed a grid search over
the restitution coefficient of the paddle, setting the other
parameters to measured values, to find the value that resulted
in the best zero-shot sim-to-real transfer. The grid search
was necessary because the new paddle surface is soft but
is modeled in simulation as a rigid body. Thus we use
the restitution coefficient to approximate ‘softness‘. Values
are detailed in Table VIII (see column ”Re-measured post
changes”). Note that the paddle restitution coefficient that led
to the best transfer, 0.44, is much lower than the measured
value of 0.84. Finally, we observed that simulated training was
harder in this setting, likely due to higher finesse required to
6
https://butterflyonline.com/Templates/RubberSpecifications.pdf

Fig. 14: After making a number of improvements to the
system, zero-shot sim-to-real transfer scores 1.82 (measured
- solve) on average whilst following a principled procedure
for measuring physical parameter values used in simulation.
This is on par with the previous baseline presented in Figure 5
reproduced here as previous baseline. Top Mean reward (with
95% CIs) on zero-shot real world evaluation. Measured phys-
ical parameters performed best. 10k = evaluation at 10k steps.
solve = evaluation at earliest step < 10k which solved the
task (≥ 97.5 maximum training return). Policies evaluated at
the solve step had slightly higher performance on average. R
= restitution coefficient. M = mass. Bottom Percent of seeds
that solve the task.
return the ball with the new paddle. To remedy this we added
a small bonus for hitting the ball towards the opponent’s side
of the table even if the policy did not return it over the net.
The reward increases proportionally to how close to ball was
to the net.
After making these changes, we re-ran the physical pa-
rameter study and present the results in Figure 14
7
. We find
that zero-shot sim-to-real transfer is on par with the previous
baseline (see top chart, measured vs previous baseline). We
also observe that evaluating policies at the checkpoint when
they first solve the task (i.e. first checkpoint to score ≥ 97.5%
maximum training return) perform slightly better on average
than evaluating at the end of training, after 10k training steps.
However the difference is not statistically significant.
Performance loss by not randomizing the table restitu-
tion is similar to our original study, however (fortunately)
performance is less sensitive to small changes in parameter
values. For example, increasing the ball restitution by 10% or
7
2 / 50 seeds got stuck. One for table no R randomize, and one for -10%
paddle M. These results are reported over 9 instead of 10 seeds. We do not
think this materially affects any of the findings.
reducing the paddle restitution by 10% only led to a small
reduction in performance. However large changes may lead
to performance collapse as indicated by reducing the table
restitution coefficient by 33%.
With the addition of the extra reward component, most
policies solve the task in most settings (see Figure 14, bottom).
The exception is when the table restitution coefficient was
reduced by 33%, reducing the bounciness of the incoming
ball and likely making the task very difficult to learn.
J. Simulator Parameter Studies: Study values
Table VI presents the latency values for each of the assessed
settings. Table VII contains the details of all of the different
ball distributions and Figure 15 visualizes them. A distribution
is visualized by sampling 500 initial ball conditions and
plotting a histogram of the ball velocity in each dimension,
and plotting the initial ball xy and the landing ball xy below
it. Table VIII gives details of the tuned and measured physical
parameters.
K. Task Space Studies: Additional Results
Additional results from training in task space (Figure 13)
show that it enables more seeds to solve the task, likely by
making the problem more intuitive to learn for the training al-
gorithm. This trend is more pronounced in the harder problem
setting (damped environment). Here only 10% of joint space
policy seeds solve the task compared with around 80% of
task space policy seeds. We also show the results of zero-shot
transfer of the converged seeds. In the original environment,
the transfer performance of task space policies is slightly lower
than joint space. Looking at the behavior, we see that most of
the balls are returned short, and hit the net. This phenomena
can be explained by the sim-to-real gap and that policies
trained in task space prefer softer returns (with less velocity
on the paddle). On the other hand, in the harder (damped)
environment, task space policies learn to return faster and more
dynamically. In this setting, transfer to the real hardware is
much better, with task space policies returning 97% of the
balls and scoring 1.95 out of 2.0.
L. Debugging
The many interacting components in this system create a
complex set of dependencies. If the system suddenly starts
performing worse, is it a vision problem, a hardware failure,
or just a bad training run? A major design decision was to
be able to test as many of these components independently as
possible and to test them as regularly as possible. The design
of the system allows it to remotely and automatically run a
suite of tests with the latest software revision every night,
ensuring that any problems are detected before anyone needs
to work with the robot in the morning.
Each test in the suite exercises a particular aspect of the
system and can help isolate problems. For example, a test
that simply repeats a known sequence of commands ensures
the hardware and control stack are functional while a test
that feeds the policy a sequence of ball positions focuses
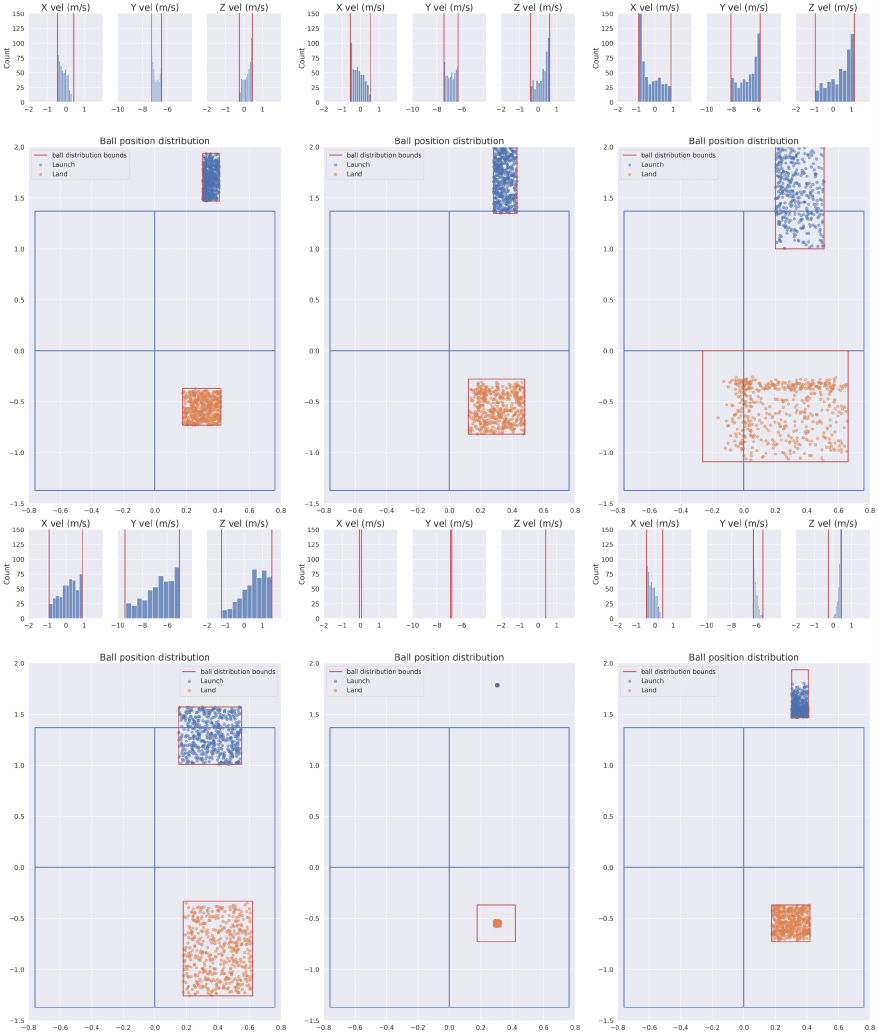
Fig. 15: Visualization of all the ball distributions used in the simulated parameter ball distribution study. A distribution is
visualized by sampling 500 initial ball conditions and plotting a histogram of the ball velocity in each dimension (3 small
charts), and plotting the initial ball xy and the landing ball xy below it. Red lines mark the boundaries of the distribution.
Distributions are shown as follows: (top left) thrower (baseline), (top center) medium, (top right) wide, (bottom left) thrower
2, (bottom center) tiny, (bottom right) velocity offset.

Latencies (ms): µ (σ)
Component 100% (baseline) 0% 20% 50% 150%
Ball observation 40 (8.2) 0 8 (3.7) 20 (5.8) 60 (10.0)
ABB observation 29 (8.2) 0 5.8 (3.7) 14.5 (5.8) 43.4 (10.0)
Festo observation 33 (9.0) 0 6.6 (4.0) 16.5 (6.4) 49.5 (11.0)
ABB action 71 (5.7) 0 14.2 (2.5) 35.5 (4.0) 106.5 (7.0)
Festo action 64.5 (11.5) 0 12.9 (5.1) 32.3 (8.1) 96.8 (14.1)
TABLE VI: Values used in the simulated latency study.
Component Thrower (baseline) Medium Wide Tiny Thrower 2
Initial ball velocity
Min x velocity -0.44 -0.55 -0.87 -0.05 -0.9
Max x velocity 0.44 0.55 0.87 0.05 0.9
Min y velocity -7.25 -7.45 -8.04 -6.90 -9.4
Max y velocity -6.47 -6.27 -5.68 -6.80 -5.0
Min z velocity -0.24 -0.42 -0.95 0.41 -1.2
Max z velocity 0.46 0.63 1.16 0.42 1.5
Initial ball position
Min x start 0.30 0.28 0.20 0.30 0.15
Max x start 0.41 0.43 0.51 0.31 0.55
Min y start 1.47 1.35 1.00 1.78 1.01
Max y start 1.94 2.05 2.40 1.79 1.57
Min z start 0.55 0.54 0.50 0.57 0.25
Max z start 0.61 0.63 0.67 0.58 0.64
Ball landing bounds
Min x land 0.18 0.12 -0.26 0.18 0.18
Max x land 0.42 0.48 0.66 0.42 0.62
Min y land -0.73 -0.82 -1.09 -0.73 -1.26
Max y land -0.37 -0.28 0 -0.37 -0.33
TABLE VII: Values used in the simulated ball distribution study.
Parameter Tuned (baseline) Measured Re-measured post changes*
Table
Restitution coefficient 0.9 +/- 0.15 0.92 +/- 0.15 0.9 +/- 0.15
Lateral friction 0.1 0.33 0.1
Rolling friction 0.1 0.1 0.001
Spinning friction 0.1 0.1 0.001
Paddle
Mass 80g 112g 136g
Restitution coefficient 0.7 +/- 0.15 0.78 +/- 0.15 0.44 +/- 0.15
Lateral friction 0.2 0.47 1.092
Rolling friction 0.2 0.1 0.001
Spinning friction 0.2 0.1 0.001
Ball
Mass 2.7g 2.7g 2.7g
Restitution coefficient 0.9 0.9 0.9
Lateral friction 0.1 0.1 0.1
Rolling friction 0.1 0.1 0.001
Spinning friction 0.1 0.1 0.001
Linear damping 0.0 0.0 0.0
Angular damping 0.0 0.0 0.0
TABLE VIII: Values used in the simulated physical parameters study.
+/- values indicate randomization range. If no +/- value is given the
value is not randomized during training. * see Appendix Section I.
on the inference infrastructure, independent of the complex
vision stack. Additionally, by running these tests every day,
an acceptable range of performance can be ascertained and
trends can be tracked. The independent evaluation also enables
testing and verification of changes to the various components.
For example, when changing from Python to C++ control
discussed in Section II-B the metrics from the nightly tests
were used to judge if the new control mechanisms were
working as expected.
Due to the agile and interconnected nature of a system, it is
also nearly impossible to debug in real time and many issues
can only be reproduced when the whole system is running
at full speed. Another key decision was to log everything.
In the nightly tests described above, not only are the results
logged but many key metrics such as latency are captured
which can further isolate failures. Additionally, the state of
all aspects of the robot, environment, and even intermediate
states (e.g. the safety simulator) are logged and can be played
back later in a convenient interface (Figure 16 that shows the
user many aspects of the system at once and allows them to
step through the environment states in a way that’s impossible
to do on the actual robot. While the initial costs of planning
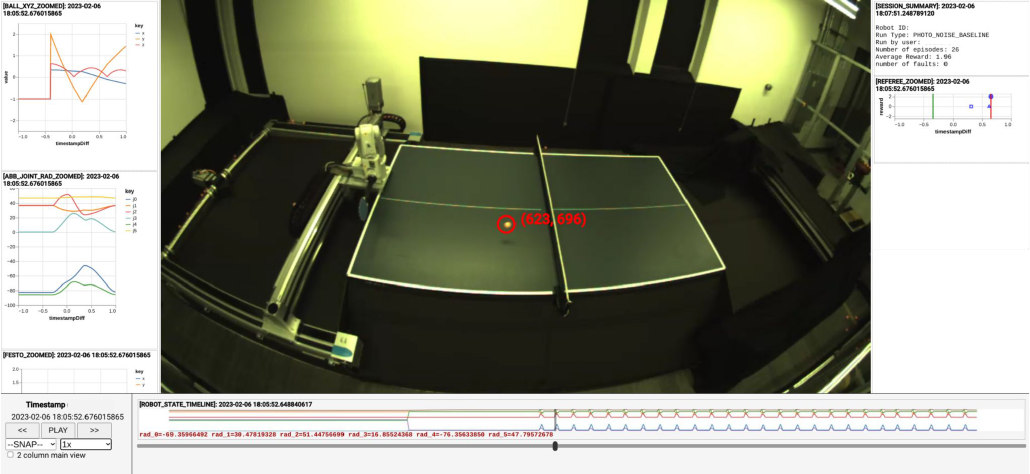
Fig. 16: Debugging visualization used in the system. Sensitive information has been redacted. This interface synthesizes logs
from several components in a unified interface that makes debugging the system and understanding its state very straightforward.
and executing efficient logging system are high, they more
than pay for themselves in diagnostic ability. The next section
dives more deeply into the various aspects of logging.
M. Logging
Logging throughout the system is very useful for multiple
reasons: Debugging, Timing & Performance analysis, Visual-
ization, Stats & Metric tracking. The logs are primarily divided
between:
1) Structured Logs: This includes detailed high frequency
logging used for timing & performance analysis as well
as visualizations. This data is post-processed to give
lower-granularity summary metrics.
2) Unstructured Logs: These are human readable logs,
primarily capturing informational data as well as un-
expected errors & exception cases.
3) Experiment Metadata: A small amount of metadata
describing each experiment run helps organize all logs
by runs.
High frequency logging is useful to introspect into the
performance of the system. Individual raw events are logged,
including hardware feedback as well as the data at different
steps in the pipeline through transformations, agent inference
and back to hardware commands. Logging the same data
through multiple steps of transformation along with tracing
identifiers, helps us track the time taken between steps to
analyze the performance of the system. Raw high frequency
data allows us to capture fine-grained patterns in the timing
distribution that are not as easily revealed by just summary
metrics. Care must be taken when logging at high frequen-
cy/throughput to not have performance issues from the logging
system itself. Logging system overhead is low on the Python
side, saving the heavy lifting for an asynchronous C++ thread
that actually saves and uploads the logs. Other performance
metrics we log include CPU and Thread utilization.
